

Bionic forearm wearable mechanism
A technology of forearm and arm cuff, which is applied in the field of bionic forearm mechanism, can solve the problems of heavy weight, poor flexibility, and large volume, and achieve the effect of light weight, good bionic effect, and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
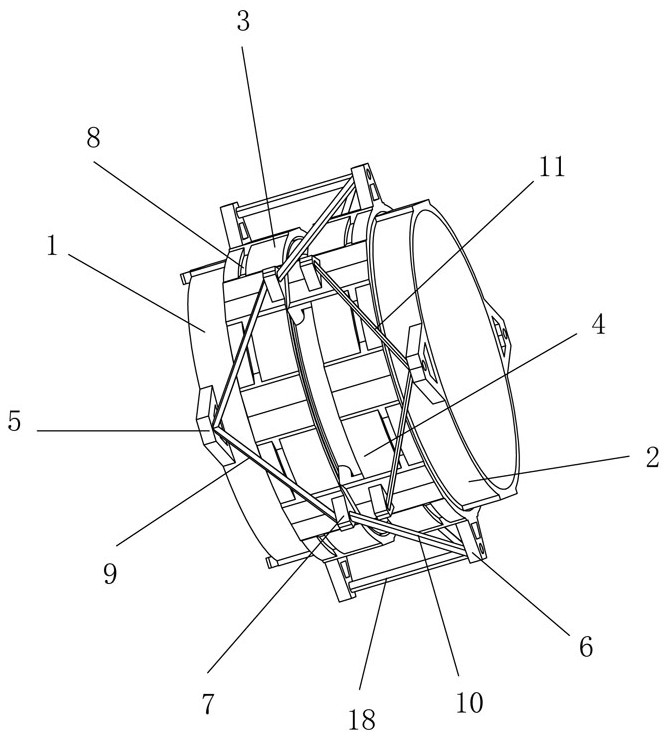
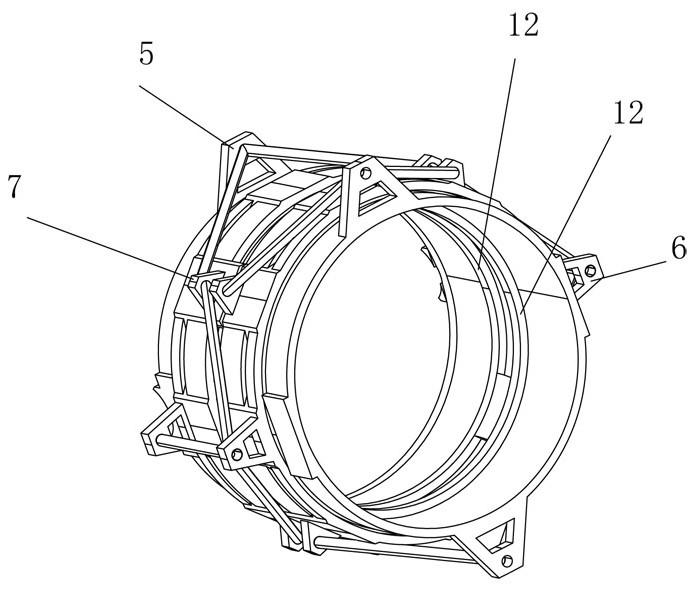
[0022] Such as figure 1 and 2 As shown, a bionic forearm wearable mechanism includes a forearm sleeve composed of a first sleeve 1 and a second sleeve 2 . The first sleeve 1 and the second sleeve 2 are parallel to each other. A first swivel 3 and a second swivel 4 are installed between the first sleeve 1 and the second sleeve 2 . The axes of the first sleeve 1 , the first swivel 3 , the second swivel 4 and the second sleeve 2 are coincident, and they can rotate with each other. The first sleeve 1 and the second sleeve 2 have the same structure, and the first swivel 3 and the second swivel 4 have the same structure.
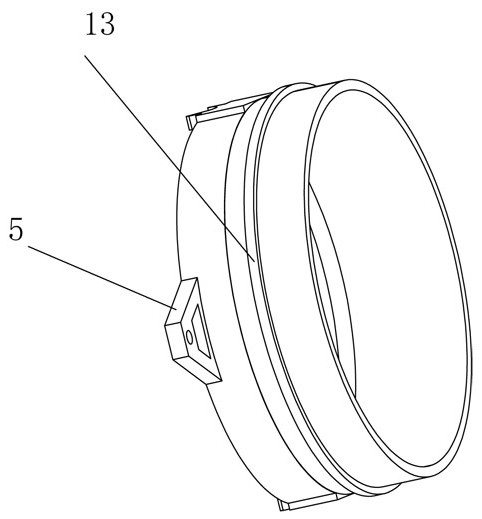
[0023] Such as image 3 As shown, the outer peripheral surface of the first sleeve 1 is integrally formed with two arm sleeve fixed ends 5 , and the two arm sleeve fixed ends 5 are evenly distributed outside the first sleeve 1 . An annular protrusion 13 is integrally formed on the outer peripheral surface of the first sleeve 1 .
[0024] Such as Figure 4 A...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More