A wall-climbing robot and its control method
A wall-climbing robot and robot technology, applied in the direction of motor vehicles, reduction of greenhouse gases, climate sustainability, etc., can solve problems such as inability to achieve rotation and translation, and achieve the effects of wide application range, good safety, and improved detection efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] In order to make the above objects, features and advantages of the present invention more clearly understood, the specific embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
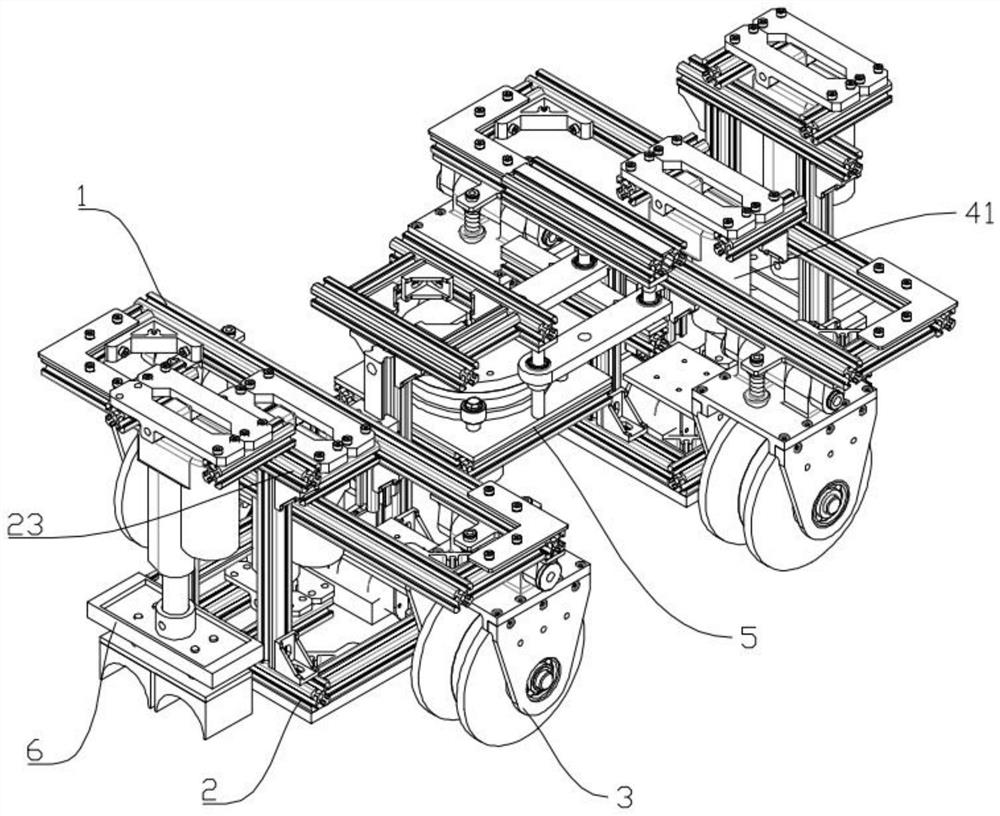
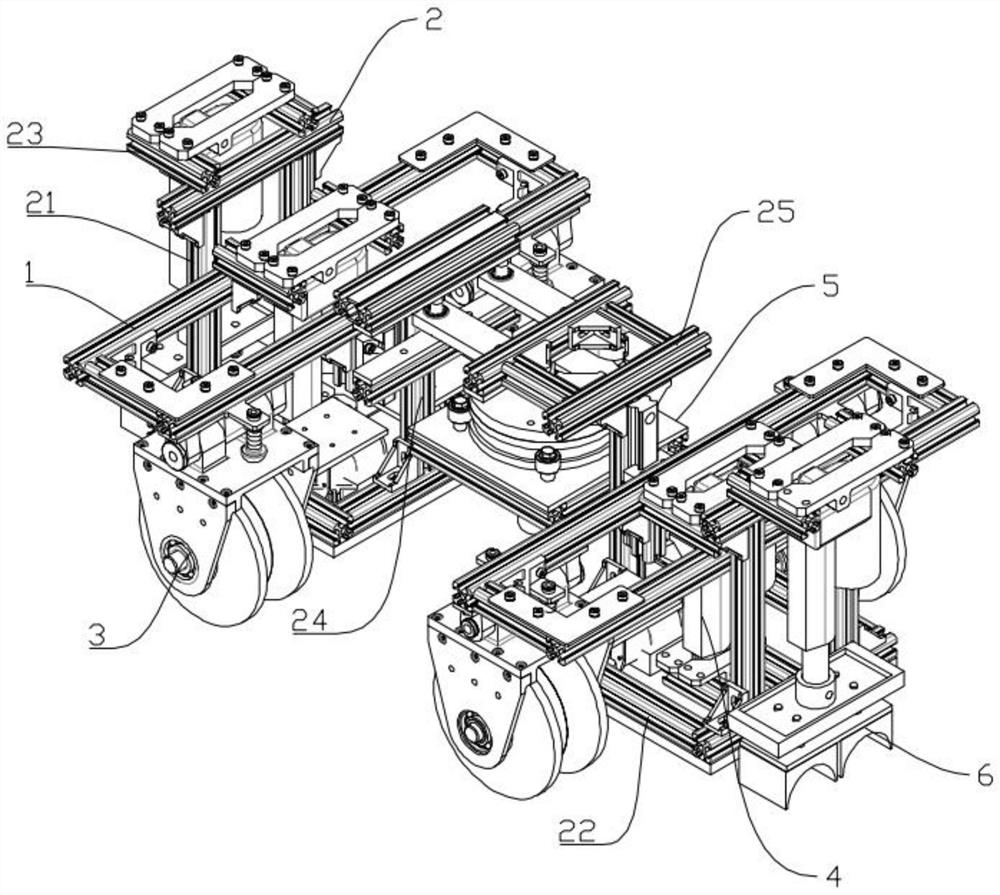
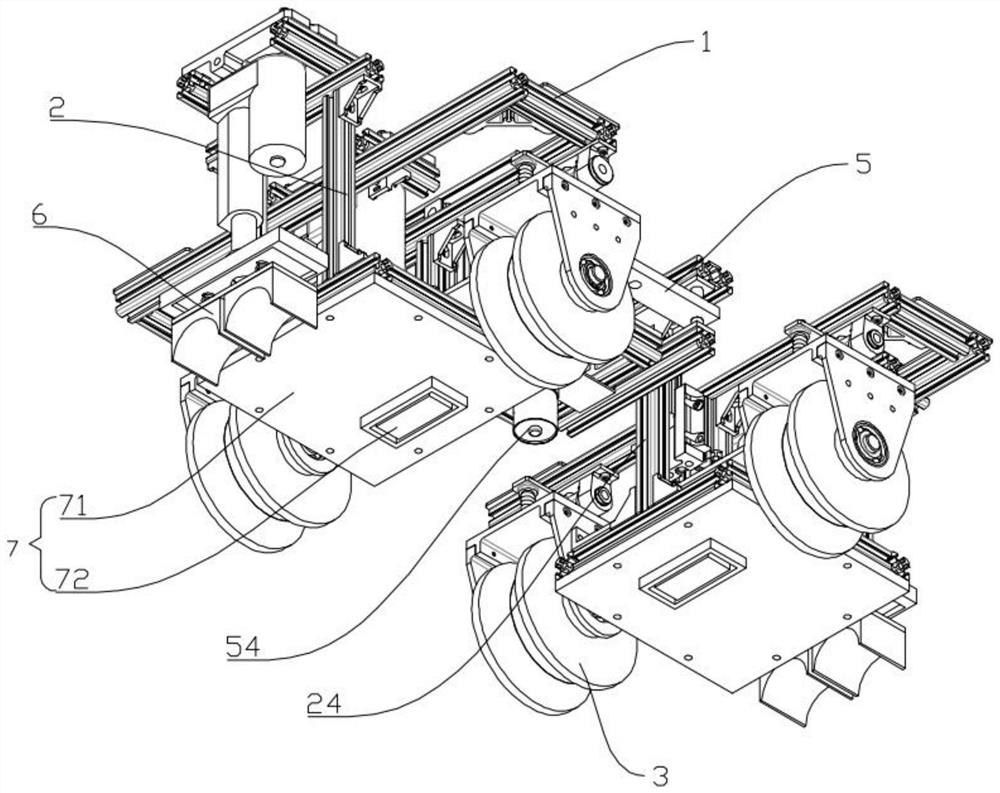
[0033] like Figures 1 to 7 As shown, this embodiment provides a water-cooled wall-climbing robot, which includes an inner frame 1, an outer frame 2, a wheel assembly 3, a rotation and translation device 5 and an adsorption device, and the inner frame 1 and the outer frame 2 are connected by a lifting device 4. , wherein the wheel assembly 3 is connected with the inner frame 1, the rotation and translation device 5 and the adsorption device are connected with the outer frame 2, the lifting device 4 drives the inner frame 1 to move, and the inner frame 1 drives the wheel assembly 3 to move towards or away from the water cooling wall. , the rotation and translation device 5 is installed at the position near the middle of the robot body...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More