

Driving collision avoidance optimization method based on deep reinforcement learning in car-following state
A technology of reinforcement learning and optimization methods, applied in the field of driving collision avoidance optimization based on deep reinforcement learning, can solve the problem of not many collision avoidance optimization methods, and achieve the effect of objective and accurate score evaluation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
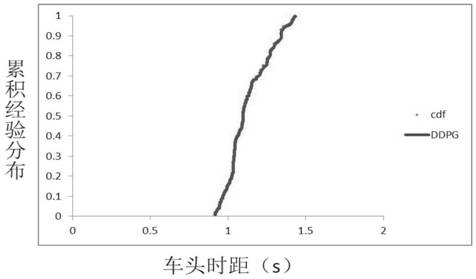
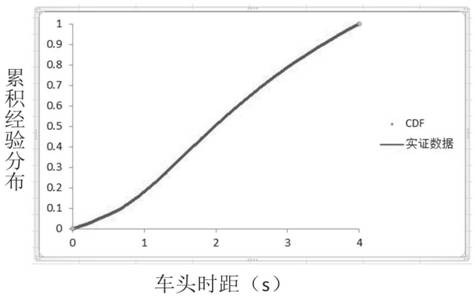
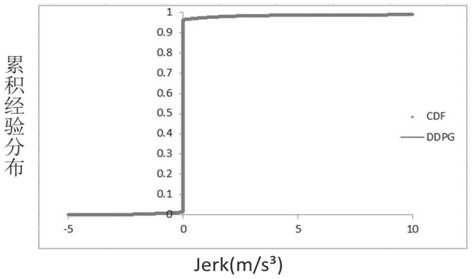
[0049] A driving collision avoidance optimization method based on deep reinforcement learning in the car-following state. Based on the vehicle trajectory data of the Next Generation Simulation (NGSIM) project, the car-following data of the selected HOV lane is divided into training data and verification data. By constructing a simulation car-following scene, the reinforcement learning agent interacts with the environment through a series of states, actions and rewar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More