

Robot skill learning method and device, electronic equipment and storage medium
A robot and skill technology, applied in the computer field, can solve the problems of long learning time, difficult convergence, low success rate, etc., to achieve the effect of improving robustness, solving difficult convergence, and accurate learning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS The following examples are for more clearly explaining the technical solutions of the present invention without limiting the scope of the invention.
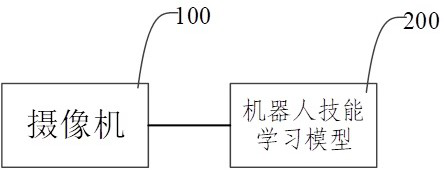
[0075] The method of robot skill learning provided by the embodiment of the present invention can be applied to figure 1 In the system architecture shown, the system architecture includes a camera 100, a robot skill learning model 200.
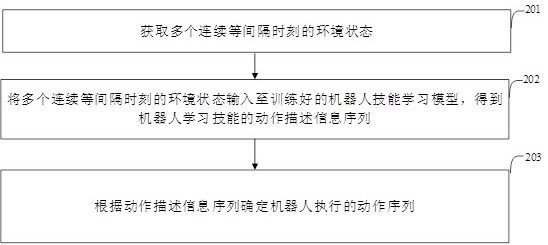
[0076] Specifically, the camera 100 is used to acquire a plurality of consecutive equality intervals.
[0077] It should be noted that the environmental status includes robot status and task phase markers. The robot skill learning model 200 is used to obtain the operational description of the robot learning skills after entering a plurality of continuous equal intervals.
[0078] Further, the operation sequence of the robot performs by the operation description information sequence is described.
[0079] It should be noted that, in which the t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More