

Spatial point cloud measurement system and calibration and reconstruction method
A technology of spatial point cloud and measurement system, applied in the field of point cloud measurement, can solve the problems of complex process, high production cost, low reliability, etc., and achieve the effects of simple system structure, easy cost control, and simple calibration.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
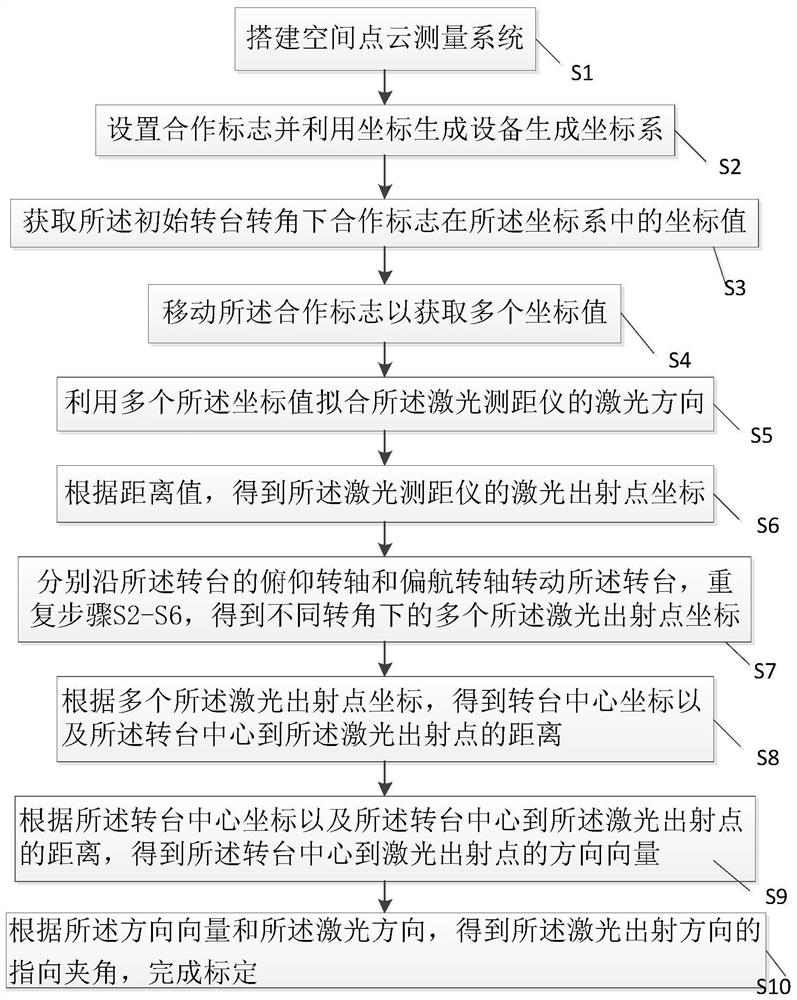
[0050] The technical scheme that the present invention solves the problems of the technologies described above is as follows:
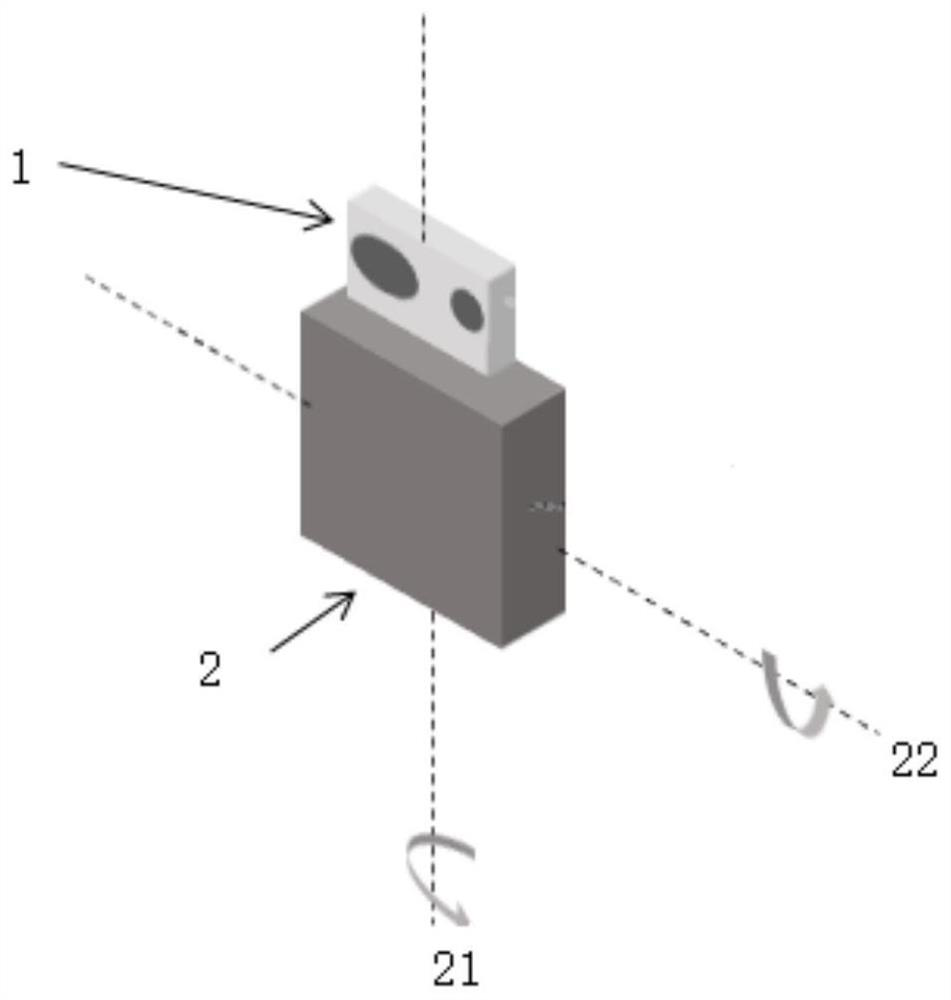
[0051] The present invention provides a space point cloud measurement system, referring to figure 2 As shown, the space point cloud measurement system includes:
[0052] A laser range finder 1, the laser range finder 1 is used to obtain the spatial distance information between the target to be measured and the laser range finder 1;
[0053] The turntable 2, the laser range finder 1 is fixed on the turntable 2, and the turntable 2 includes a pitch rotating shaft 22 and a yaw rotating shaft 21, and the axes of the pitch rotating shaft 22 and the yaw rotating shaft 21 are in space Inner intersection, used to provide angle information during spatial point cloud measurement;
[0054] A processor, the processor is used to obtain the spatial distance information and the angle information in the spatial point cloud measurement process; control the laser ra...
Embodiment 2
[0090] According to the first aspect of the present invention, the present invention provides a kind of space point cloud measurement system, comprises turntable 2, is used for obtaining the angle information of point cloud reconstruction on the surface of the object to be measured; Laser range finder 1, is fixed on turntable 2 , can rotate with the turntable 2, and is used to obtain the distance information of the point cloud reconstruction on the surface of the object to be measured; the processor obtains the surface of the object to be measured according to the distance measurement value of the laser rangefinder 1, the output rotation angle value of the turntable 2, and the parameters obtained by calibration Point cloud information, and then realize object measurement.
[0091] The present invention provides a calibration method for a space point cloud measurement system, wherein the calibration parameters are the distance from the rotation center of the turntable 2 to the l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More