Laser comprehensive reference system for underwater detection and distance measurement and calibration method
A reference system and laser technology, applied in radio wave measurement systems, measurement devices, and using re-radiation, etc., can solve the problems of large underwater environment errors, manual errors, and inconvenient portability, and achieve low cost, accurate self-parameter values, The effect of improving work performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
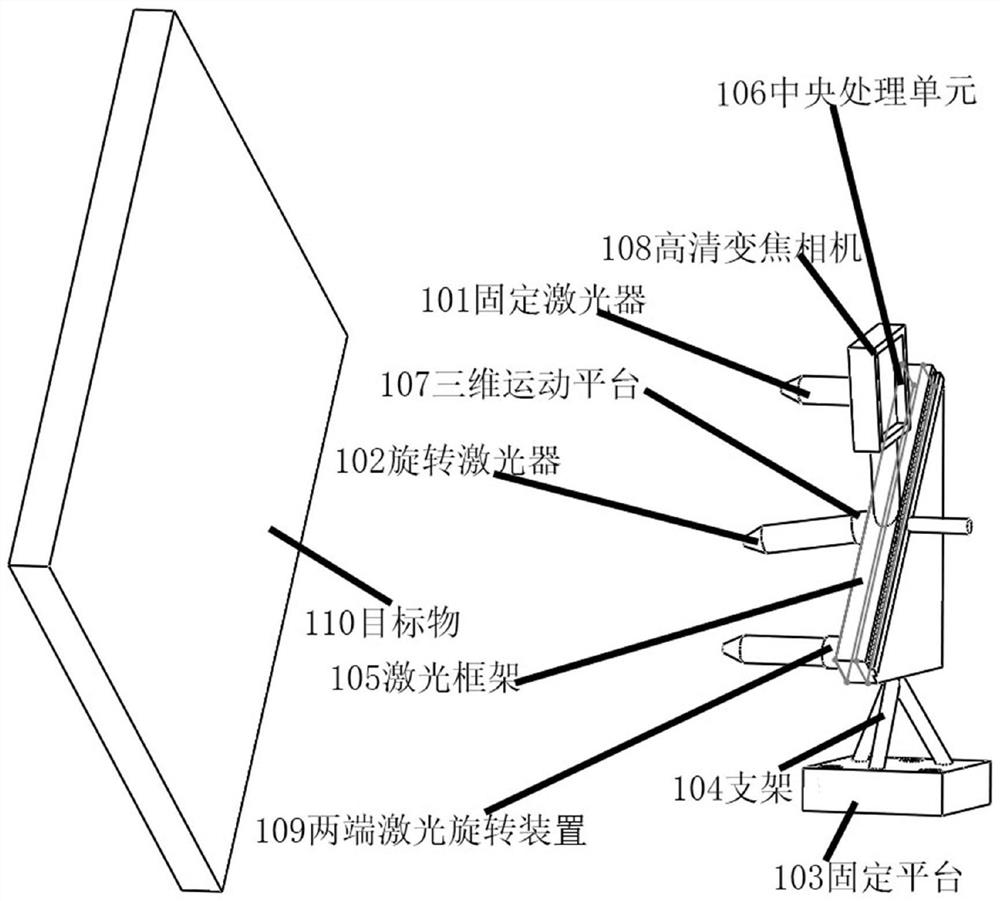
[0054] In this example, see figure 1 , a laser comprehensive reference system for underwater detection, including a fixed platform 103, a laser frame 105 is installed through a bracket 104, a fixed laser 101 is housed on the laser frame 105, a rotating laser 102, a central processing unit 106, and a three-dimensional motion platform 107. Zoom high-definition camera 108 and laser rotating device 109 at both ends; the bracket 104 is mounted on the underwater robot in a bolt-connected manner with the fixed platform 103, and the two fixed lasers 101 are installed on the laser frame 105, each fixed The laser 101 is equipped with laser rotating devices 109 at both ends, which are used to adjust the rotation angle of the fixed laser 101. The rotating laser 102 is installed in the middle of the laser frame 105. The three-dimensional motion platform 107 installed on the rotating laser 102 includes a translation mechanism and a rotation mechanism. The three-dimensional motion platform 1...
Embodiment 2
[0057] This embodiment is basically the same as Embodiment 1, especially in that:
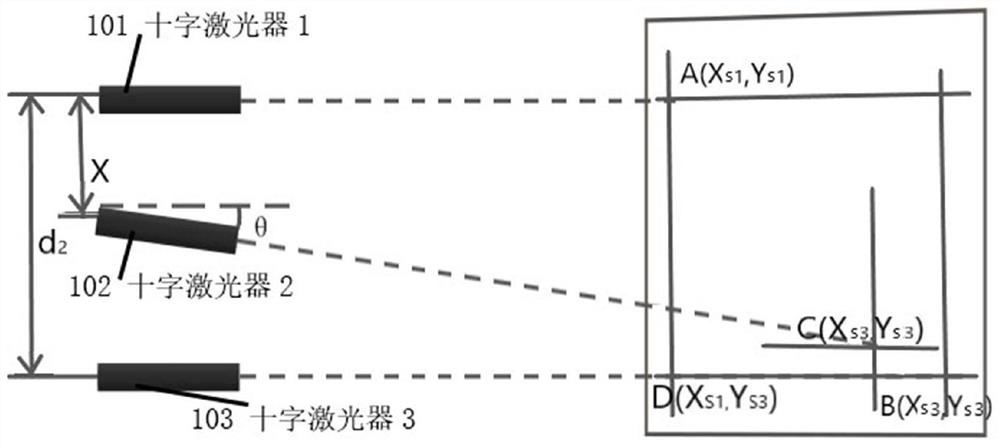
[0058] In this embodiment, a laser comprehensive ranging and calibration method for underwater detection is operated by using the laser comprehensive reference system for underwater detection in the above embodiment, and the central processing unit 106 includes a straight line extraction module 301, straight line fitting module 302, target shape judging module 303, target plane inclination judging module 304, ranging module 305 and calibration module 306; adopt laser cross ranging method to realize target, ranging, function, adopt laser cross ranging The method realizes online calibration of a high-definition zoom camera; the process of the laser cross ranging method is as follows:
[0059] The image captured by the zoom HD camera 108 is processed by the 301 straight line extraction module to obtain the shape of the laser line, and then the laser line is carried out straight line fitting by the...
Embodiment 3
[0081] This embodiment is basically the same as the above-mentioned embodiment, and the special features are:
[0082]In this embodiment, when the slave laser ranging device is used, the device needs to be installed on the underwater robot through a bracket, and the included angle between the laser emitted by the integrated laser reference system and the target can be 90°. Turn on the laser switch. Since the fixed laser and the rotating laser are both cross lasers, it can be verified through experiments whether the lasers emitted by the fixed laser are parallel to each other and form a square shape. If the result is not a square, a square laser pattern can be obtained by rotating the rotating mechanism on the fixed laser. Then turn on the switch of the rotating laser. The laser emitted by the rotating laser is parallel to the laser emitted by the fixed laser, but the rotating laser is not parallel to the fixed laser. It is necessary to make the rotating laser and the fixed las...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap