

High-degree-of-freedom manipulator for vascular surgery
A surgical technique with degrees of freedom, applied in surgical manipulators, surgical robots, surgery, etc., can solve the problems of low degree of freedom of manipulators, contamination of surgical implements, and residual stains on splints.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
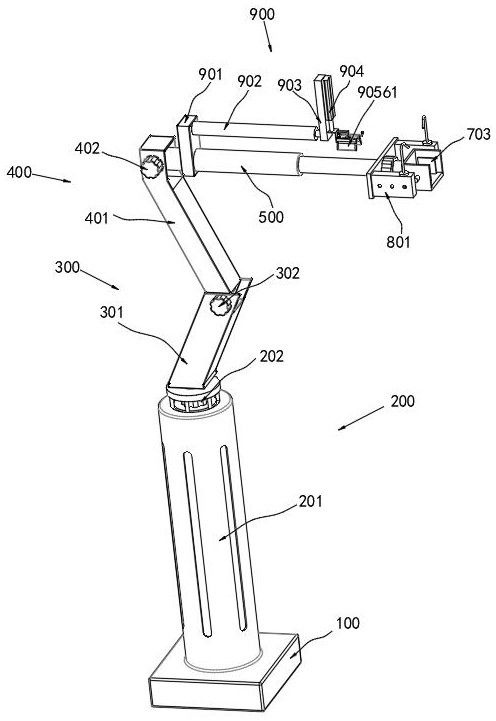
[0029] refer to Figure 1 to Figure 4, a high-degree-of-freedom manipulator for vascular surgery, including a base 100, a controller is provided in the base 100; a support table 200, including a table body 201 arranged on the top of the base 100, and a motor is provided on the top of the table body 201 One 202; connecting arm one 300, including connecting arm one body 301 arranged on the power end of motor one 202 top, through motor one 202, can drive connecting arm one body 301 to rotate, connecting arm one body 301 is provided with motor two 302 Connecting arm two 400, comprise connecting arm two body 401 that is arranged on motor two 302 power ends, can drive connecting arm two body 401 to rotate by motor two 302, connecting arm two body 401 is provided with motor three 402; Electric push rod One 500, the electric push rod one 500 is arranged on the power end of the motor three 402, and the electric push rod one 500 can be driven to rotate by the motor three 402; the connec...
Embodiment 2
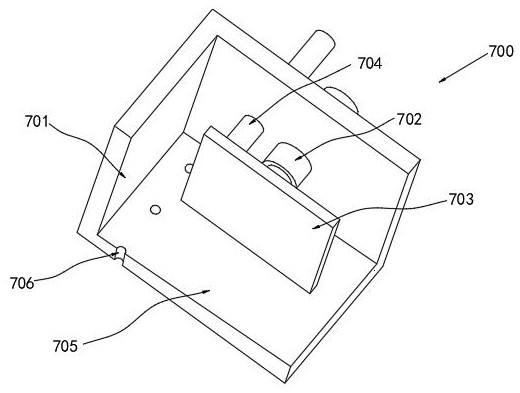
[0036] refer to Figure 2 to Figure 3 , the bottom inner wall of the support frame 701 is provided with a guide surface 705, and the guide surface 705 gradually slopes downward from right to left, and the left side of the guide surface 705 is vertically evenly provided with a drain hole 706, which is convenient for the cleaning liquid to pass through the drain Hole 706 exits.
[0037] All the other structures are the same as in Example 1.
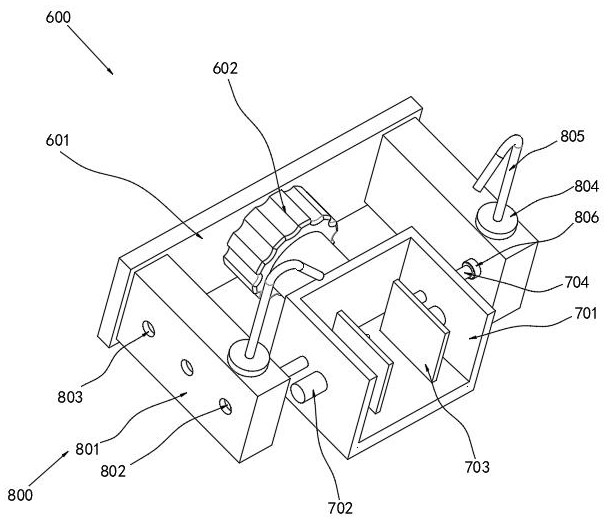
[0038] Working principle: after the two groups of splints 703 are driven close to each other by the electric telescopic rod 702 to fix the surgical implement, the motor 1 202 can drive the connecting arm 1 body 301 to rotate, the motor 2 302 can drive the connecting arm 2 body 401 to rotate, and the motor 3 can drive the body 401 to rotate. It can drive the electric push rod one 500 to rotate, the electric push rod one 500 can drive the connecting plate 601 to move laterally, and the motor four 602 can drive the support frame 701 to rotate...
Embodiment 3
[0040] After the cleaning operation is completed, if it is placed directly indoors, dust, germs, etc. will easily accumulate and adhere to the operating end of the robotic arm. Membrane assembly 510 .
[0041] Such as Figure 5-9 , the membrane assembly 510 is used to seal the end of the manipulator after the cleaning is completed;
[0042] The film assembly 510 includes a multi-section telescopic rod 511, an air pump 512, a hose 513, a fixing frame 514, and a heat shrinkable bag 515;
[0043] The multi-section telescopic rod 511 is fixed on the lower side of the electric push rod-500; the telescopic direction is consistent with the direction of the electric push rod-500;
[0044] The air pump 512 is fixed on the end of the multi-section telescopic rod 511;
[0045] The air outlet of the air pump 512 is connected to the hose 513;
[0046] The telescopic end of the multi-section telescopic rod 511 is fixedly connected to the fixed frame 514; the fixed frame 514 is U-shaped,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More