

Target tracking method of photoelectric tracker, terminal and readable storage medium
A technology for photoelectric tracker and target tracking, which is applied to instruments, non-electric variable control, two-dimensional position/channel control, etc. Stable tracking, solving the effect of lag
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
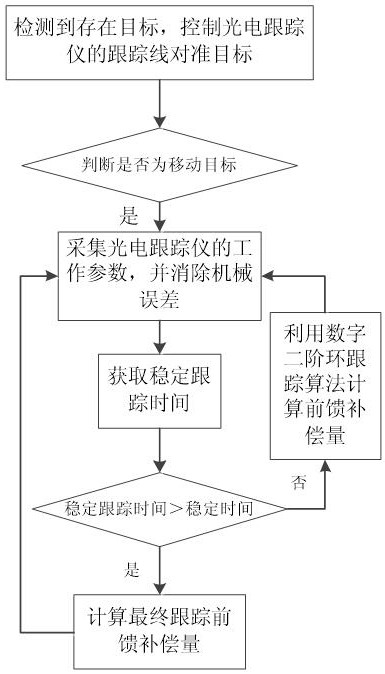
[0082] Such as figure 1 As shown, the present embodiment provides a target tracking method of a photoelectric tracker, including:
[0083] S1. The photoelectric tracker detects that there is a target in the tracking visual area, and obtains the first position of the target, and aligns the tracking line of the photoelectric tracker with the first position;
[0084] Through the existing system of the photoelectric tracker, it is possible to judge whether there is a target to be tracked in the tracking visual area, and mark the position of the target at this time, set it as the first position, and then control the servo of the photoelectric tracker The system aligns the tracking line to the corresponding position.
[0085] S2. Judging whether the target is still at the first position at this time, if it is "no", it is determined that the target is in a moving state, and the tracking line of the photoelectric tracker is controlled to follow the target to move;
[0086] After mov...
Embodiment 2
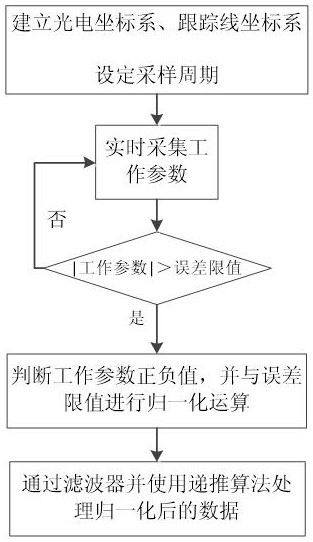
[0098] This embodiment is a specific description of step S3, such as figure 2 shown.
[0099] The method for collecting the working parameters of the photoelectric tracker includes:
[0100] A1. Establish photoelectric coordinate system , tracking line coordinate system ;
[0101] The origin of the photoelectric coordinate system is the intersection of the azimuth rotation axis of the azimuth axis servo system and the pitch rotation axis of the pitch axis servo system, The axis is the direction of the photoelectric tracker when the tracking line is zero, which is parallel to the installation base of the photoelectric tracker. The axis is parallel to the installation base of the photoelectric tracker and perpendicular to axis, pointing to the right along the zero position direction of the trace line, axis perpendicular to the plane ; The azimuth angle is defined by the left-hand rule, and the elevation angle is defined by The plane is zero, and the upward lif...
Embodiment 3
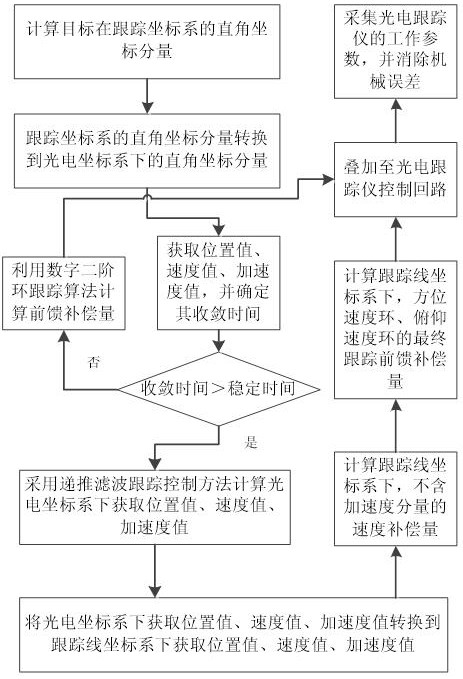
[0124] This embodiment describes steps S4-S6, as image 3 shown.
[0125] The method for obtaining the stable tracking time in step S4 is:
[0126] C1. Calculate the Cartesian coordinate component of the target in the tracking line coordinate system through the tracking deviation of the azimuth, the tracking deviation of the pitch angle and the distance;
[0127] Cartesian coordinate components can be obtained through trigonometric functions, that is, the XYZ values of the target in the tracking line coordinate system.
[0128] C2. Convert the Cartesian coordinate component of the target under the tracking line coordinate system to the photoelectric coordinate system, and obtain the Cartesian coordinate component of the target under the photoelectric coordinate system;
[0129] The photoelectric coordinate system and the tracking line coordinate system have an associated relationship, so those skilled in the art can establish a corresponding conversion matrix according to ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More