

Sweeping robot obstacle recognition and avoidance method based on depth vision
A sweeping robot and obstacle recognition technology, applied in the field of robots, can solve the problems of no path obstacles, entanglement of plastic bag obstacles, getting lost, etc., to achieve the effect of autonomous obstacle avoidance and no dead angle cleaning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention provides an embodiment of an obstacle recognition and obstacle avoidance method for a sweeping robot based on depth vision, in order to enable those skilled in the art to better understand the technical solutions in the embodiments of the present invention and achieve the above-mentioned purpose of the present invention , features and advantages can be more obvious and easy to understand, and the technical solution in the present invention will be described in further detail below in conjunction with the accompanying drawings:
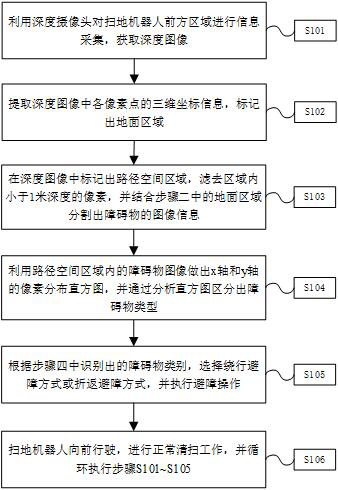
[0040] The present invention first provides an embodiment of an obstacle recognition and obstacle avoidance method for a sweeping robot based on depth vision, such as figure 1 As shown, including: the present invention is realized by the following method: a method for obstacle recognition and obstacle avoidance of a sweeping robot based on depth vision, including:
[0041] Step 1 S101. Use the depth camera to collect inform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More