

Spacecraft surface crawling robot capable of autonomously sensing movement
A crawling robot and robot technology, applied in the field of mobile robots, can solve the problems of collision-free path planning and movement in the environment, restricting application occasions, etc., so as to reduce the risk of vibration detaching from the spacecraft, simplify the design difficulty, and reduce manufacturing and launch costs. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] The present invention will be described in further detail below in conjunction with the accompanying drawings and specific embodiments.
[0065] The embodiment of the present invention provides a crawling robot on the surface of a spacecraft that perceives movement autonomously, including two parts: a mechanical structure and a control system;
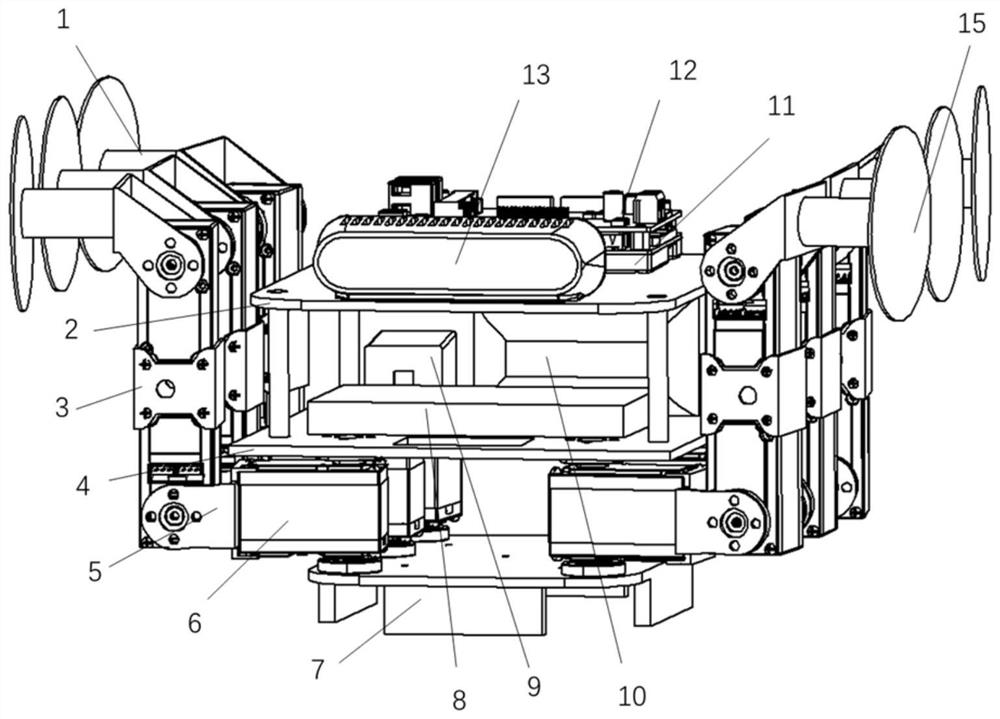
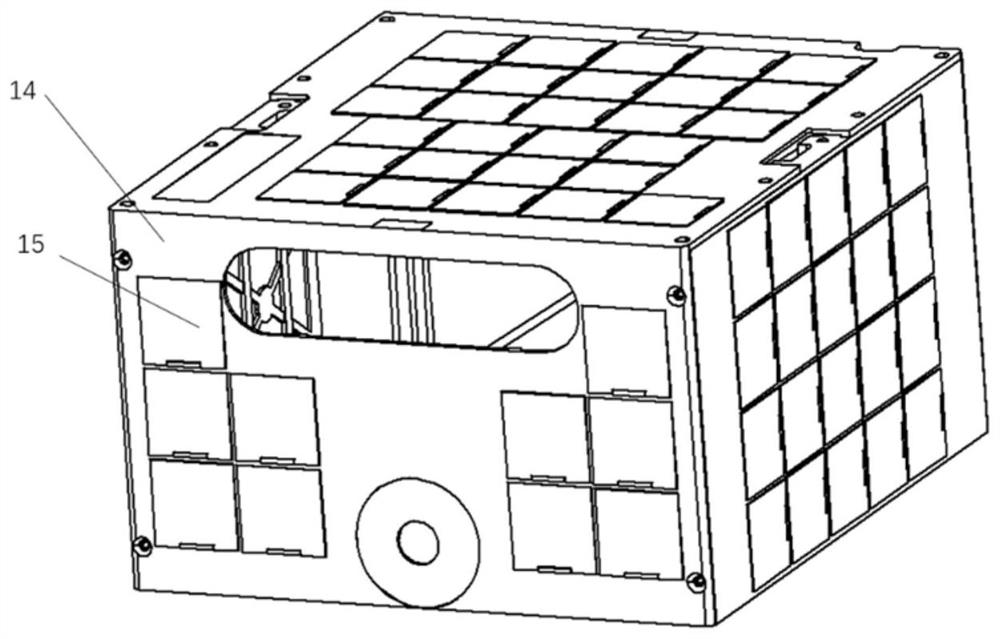
[0066] The mechanical structure of the robot is as figure 1 , 2 shown, including:
[0067] a. Six legs and feet composed of eighteen steering gears 6 are installed between the bottom plate 7 and the middle plate 4 of the robot, symmetrically distributed left and right, and are composed of three steering gears 6 connected by a connecting piece 5 and a fixing piece 3 A foot of the robot, and the foot end mechanism 1 is installed on the foot end steering gear; In the present embodiment, the steering gear 6 adopts a UART asynchronous half-duplex serial bus steering gear, and there are two I / Os on the steering gear 6. The steerin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More