

An online motion planning method for manipulator arm combining neural motion planning algorithm and artificial potential field method
An artificial potential field method and motion planning technology, applied in manipulators, program-controlled manipulators, claw arms, etc., can solve problems such as high precision requirements, complex local extremum construction of repulsive potential fields, and difficulty in training. The effect of improving training speed and success rate of motion planning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0042] A method for online motion planning of a manipulator combined with a neural programming algorithm and an artificial potential field method described in this embodiment includes the following steps:
[0043] Step 1: Establish an artificial potential field containing only the gravitational potential field in the working space of the manipulator. The establishment method of the gravitational potential field is shown in the following formula:
[0044]
[0045] In the formula, K a Indicates the gravitational coefficient, p end and at end respectively represent the position and attitude of the end coordinate system, p goal and at goal represent the target position and attitude, respectively, d p 、d a are the position distance and attitude distance, respectively. The formula for motion planning using an artificial potential field containing only a gravitational potential field is as follows:
[0046]
[0047] In the formula, J p (q t ) is the Jacobian matrix of ...
Embodiment
[0061] 1) Experimental tasks
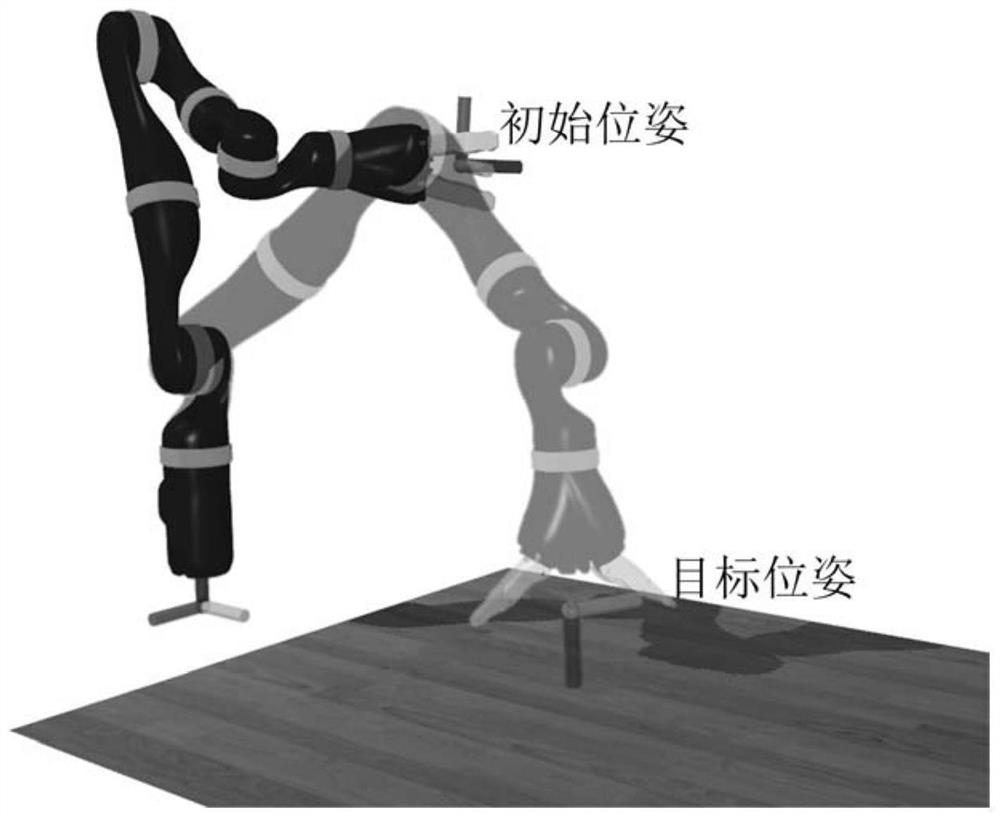
[0062] The speed of direct training on the real manipulator is very slow, and it is easy to damage the manipulator, so the present invention first establishes the dynamics and kinematics model of the manipulator in the physical simulation engine MuJoCo, and performs simulation training to verify the effectiveness of the algorithm. Finally, the trained policy network is tested in the real environment. The mechanical arm adopted in the present invention is a jaco2 cooperative mechanical arm, and this mechanical arm has 7 joints. Such as figure 1 , the training task of manipulator reinforcement learning motion planning is to move the manipulator from an initial pose to a target pose in a desktop environment. The tabletop is the environmental obstacle of the robot arm, and the training round ends when the robot arm collides with the tabletop or between the links of the robot arm itself.
[0063] 2) Training parameters
[0064] The present inventi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More