

Semantic map incremental updating method and system
A semantic map and incremental update technology, which is applied in database update, image data processing, geographic information database, etc., can solve the problems of full update, small update speed, large amount of semantic map data, and slow update speed, etc., to reduce the amount of calculation , the accuracy of the environment change area, and the effect of improving the update speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
no. 1 example
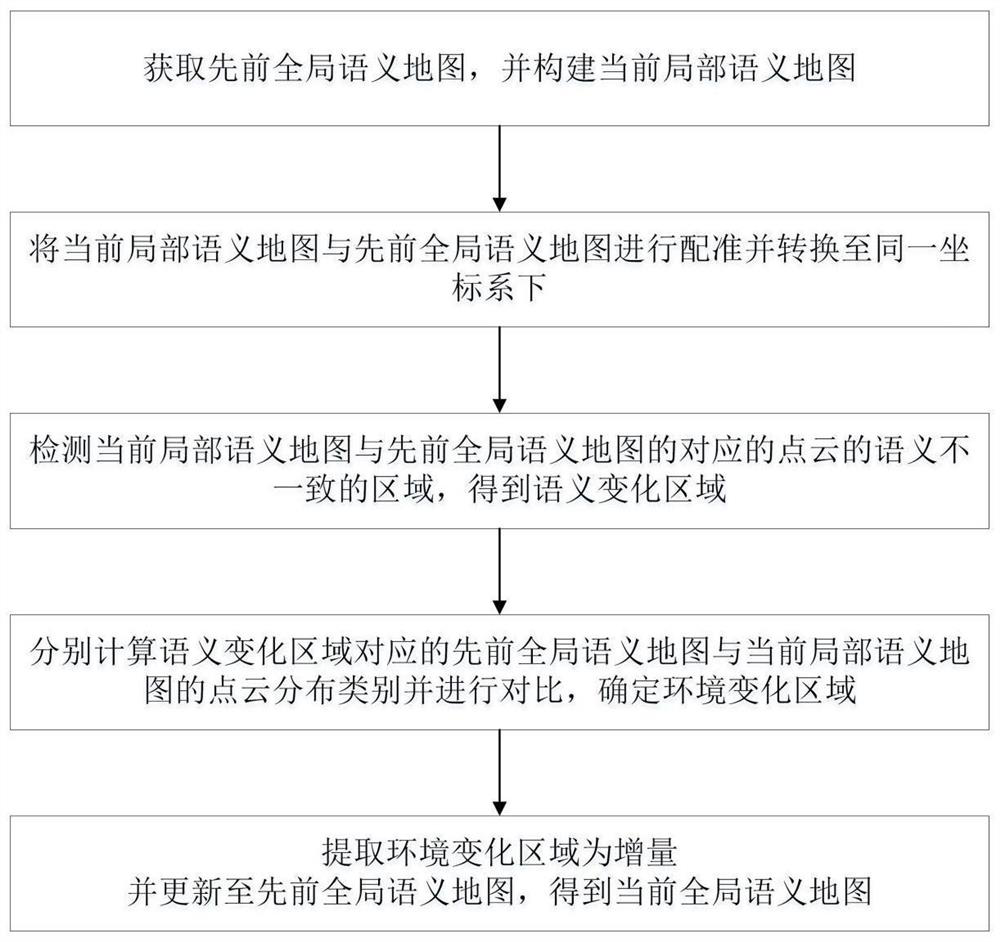
[0053] Such as figure 1 , figure 2 Shown is a first embodiment of a semantic map incremental update method, including the following steps:
[0054] S1: Obtain the previous global semantic map and build the current local semantic map;
[0055] S2: Register the current local semantic map with the previous global semantic map and transform them into the same coordinate system; to find the specific position of the current environment in the previous global semantic map;
[0056] S3: Detect the region where the semantics of the current local semantic map and the corresponding point cloud of the previous global semantic map are inconsistent, and obtain the semantic change region;
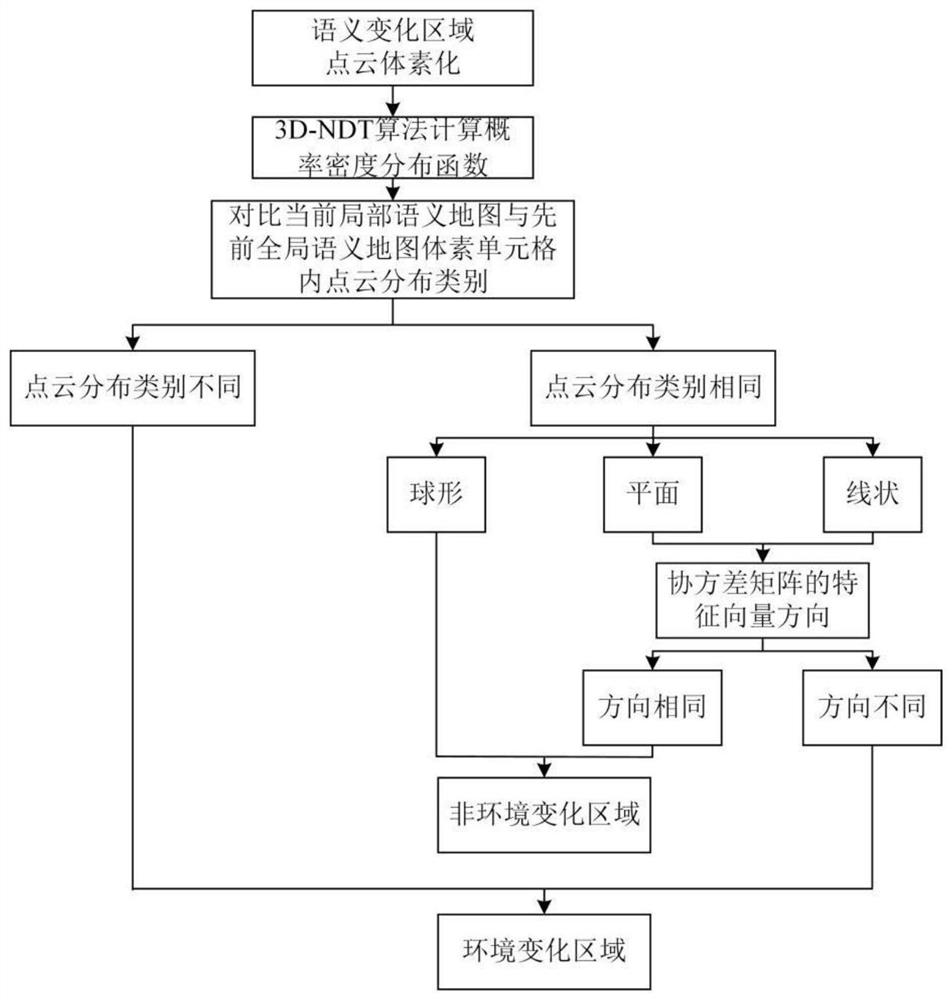
[0057] S4: Calculate and compare the point cloud distribution categories of the previous global semantic map corresponding to the semantic change area and the current local semantic map to determine the environmental change area;
[0058] S5: Extract the environment change area and update to the previ...
Embodiment 2
[0094] The difference between this embodiment and Embodiment 1 is that the previous global semantic map in this embodiment is non-voxelized data, and in step S41 of this embodiment, the current local semantic map area corresponding to the semantic change area and the previous global semantic map area Voxelization is performed, so that the previous global semantic map does not need to be voxelized entirely, and only the voxelization is performed according to the semantic change area, which can greatly reduce the data volume of the previous semantic map and further speed up the calculation speed.
Embodiment 3
[0096] Such as image 3 , Figure 4 Shown is a semantic map incremental update system, the system is used to implement the semantic map incremental update method in embodiment 1 or embodiment 2, the system stores a voxelized previous global semantic map, and the system includes sequential communication The mapping module, registration module, detection module and update module of the
[0097] The mapping module is used to construct the current local semantic map and input it to the registration module;
[0098] The registration module is used to register the current local semantic map with the previous global semantic map and transform them into the same coordinate system, and input the data after registration and coordinate transformation into the detection module;
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More