

Three-dimensional point cloud reconstruction method and system based on high-precision vector map
A technology of three-dimensional point cloud and vector map, which is applied in the direction of radio wave measurement system, measurement device, electromagnetic wave reradiation, etc., to achieve the effect of low cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
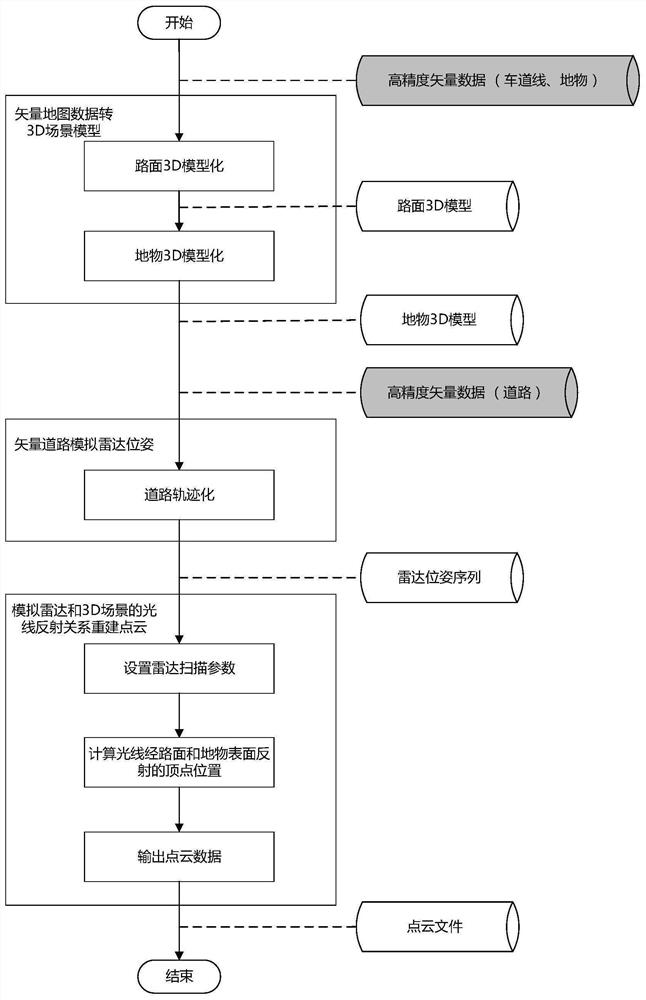
[0045] Embodiment 1 provided by the present invention is an embodiment of a 3D point cloud reconstruction method based on a high-precision vector map provided by the present invention, figure 1 , the left rectangular box is each process, the right cylindrical box is the input and output data of the corresponding process, the dark cylindrical box is the input data, and the light colored cylindrical box is the output data. figure 1 As can be seen, embodiments of the three-dimensional point cloud reconstruction method include:
[0046] Convert the road surface and ground objects in the high-precision vector map data into 3D scene models respectively.
[0047] In a possible embodiment, converting the road surface in the high-precision vector map data into a 3D scene model includes: selecting the two outermost lane edges on both sides of the road, and connecting the shape points on the two lane edges in sequence The generated road surface polygon is a 3D scene model of the road ...
Embodiment 2
[0067] Embodiment 2 provided by the present invention is an embodiment of a 3D point cloud reconstruction system based on a high-precision vector map provided by the present invention, Figure 6 A structural diagram of a 3D point cloud reconstruction system based on a high-precision vector map provided in an embodiment of the present invention, combined with Figure 6 It can be seen that the embodiment of the 3D point cloud reconstruction system includes: a vector map data conversion module, a radar pose simulation module and a point cloud reconstruction module.
[0068] The vector map data conversion module is used to convert the road surface and ground objects in the high-precision vector map data into 3D scene models respectively.
[0069] The radar pose simulation module is used to simulate the lidar pose according to the vector road in the high-precision vector map data. The vehicle lidar pose includes: position and heading direction.
[0070] The point cloud reconstruct...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More