

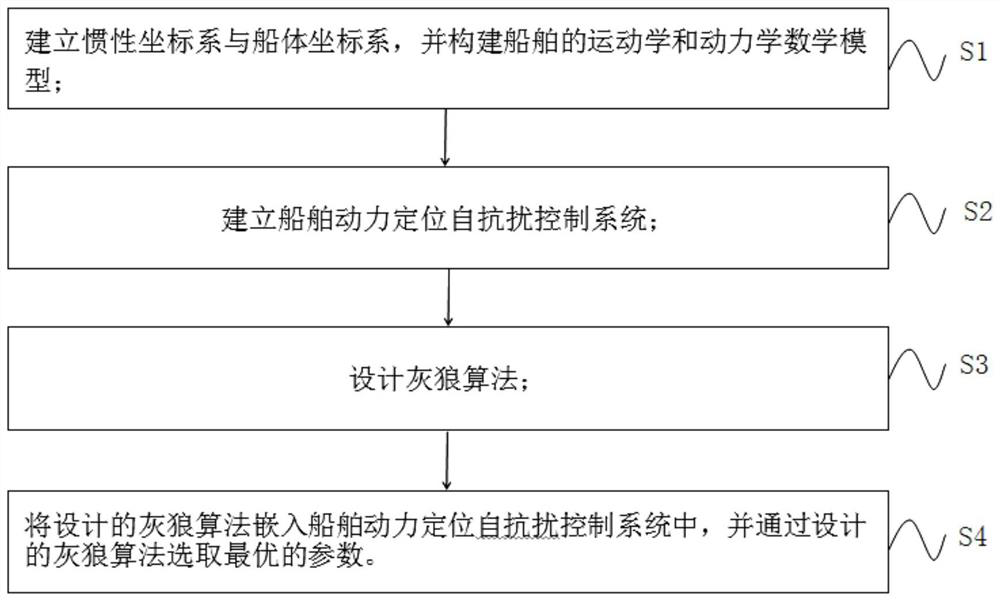
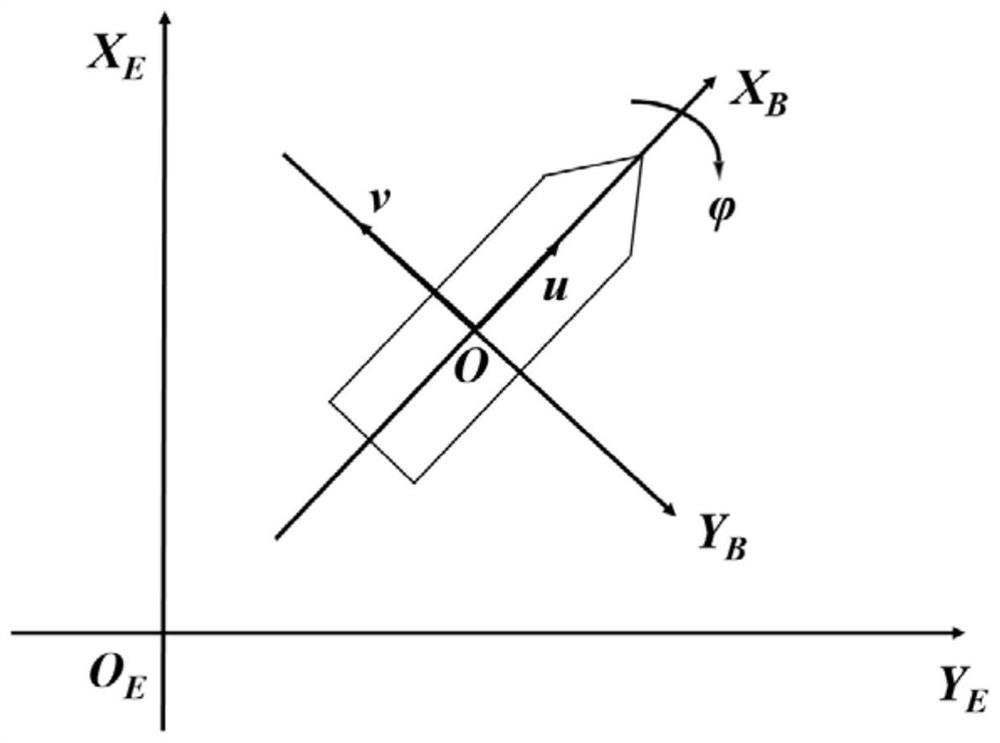
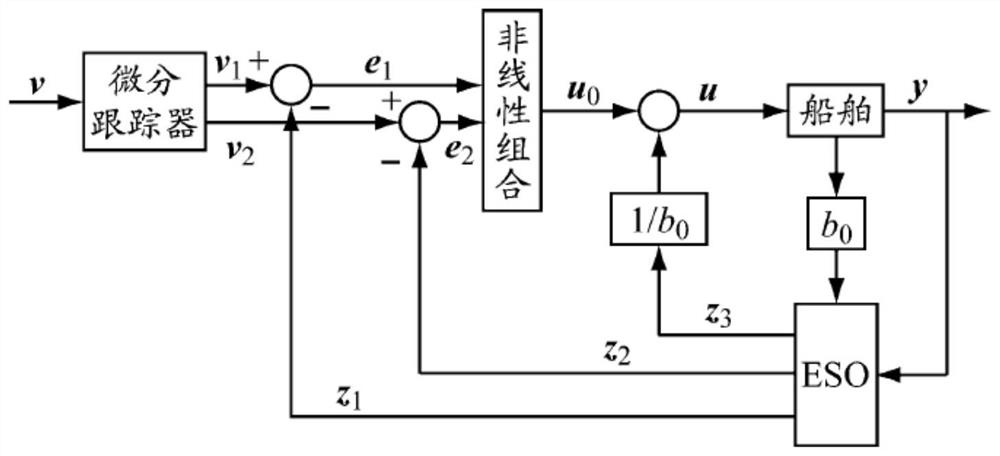
Ship dynamic positioning active disturbance rejection control method based on grey wolf algorithm
A technology of active disturbance rejection control and dynamic positioning, which is applied to electric controllers, controllers with specific characteristics, etc., can solve the problems of difficult adjustment of the parameters of the active disturbance rejection controller, and achieve enhanced ability to resist external disturbances , Reduce the frequency of speed changes, improve the effect of control effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0132] The "Beihaijiu 115" ship is used as the test model to conduct simulation experiments to verify the effectiveness of the designed ship dynamic positioning system controller. The correlation coefficient matrix of the ship is as follows:
[0133]
[0134]
[0135] The parameters of the ship dynamic positioning system are set as follows: the initial position and target position of the ship are shown in Table 1; the relevant parameters of the controller are shown in Table 2.
[0136] Initial value of the model in Table 1
[0137]
[0138] The value of each parameter in Table 2
[0139]
[0140] At t=25, step disturbance is added, and the simulation results are as follows Figure 5-8 shown. The results of the simulation experiment show that the ADRS controller of the ship dynamic positioning system provided by the present invention can accurately locate, resist the action of external disturbances, and quickly return to the desired position.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More