

Screw tightening system based on man-machine interaction type six-axis robot and screw feeder
A six-axis robot, interactive technology, applied in the direction of manipulator, program-controlled manipulator, metal processing equipment, etc., can solve the problems of not in place, unable to adjust torque, excessive tightening and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
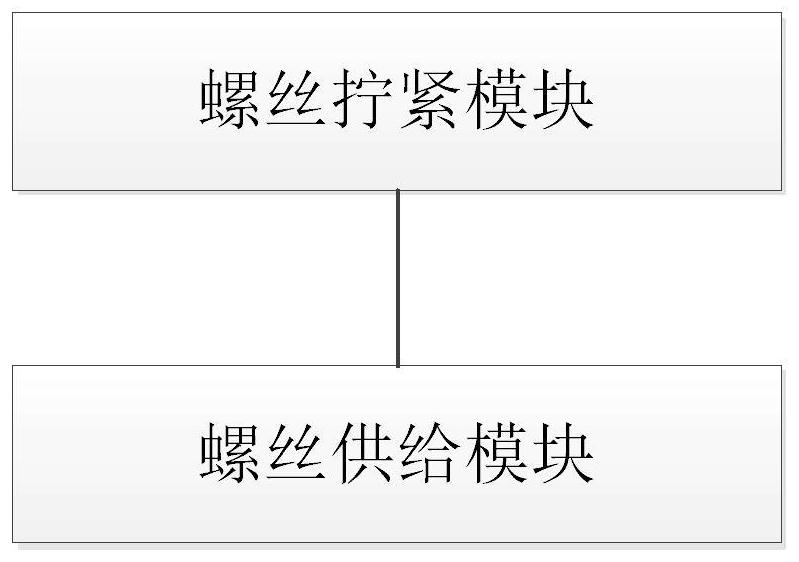
[0014] Specific implementation mode 1: The screw tightening system based on the human-computer interactive six-axis robot and the screw supply machine in this embodiment includes: a screw tightening module and a screw supply module;
[0015] The screw tightening module is implemented based on a human-computer interaction robot, including: a screw hole coordinate acquisition module, a screw monitoring module, and a screw tightening judgment module;
[0016] The screw hole coordinate acquisition module is used to acquire the coordinates of the screw holes to be screwed into, and screw the screws into the screw holes according to the coordinates of the screw holes to be screwed into;
[0017] The screw monitoring module is used to monitor the number of screw tightening circles and screwdriver torque;
[0018] The screw tightening judging module is used to judge whether the screw tightening is qualified according to the information monitored by the screw monitoring module;
[001...
specific Embodiment approach 2
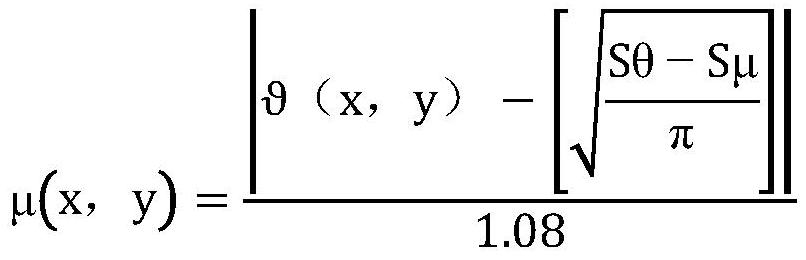
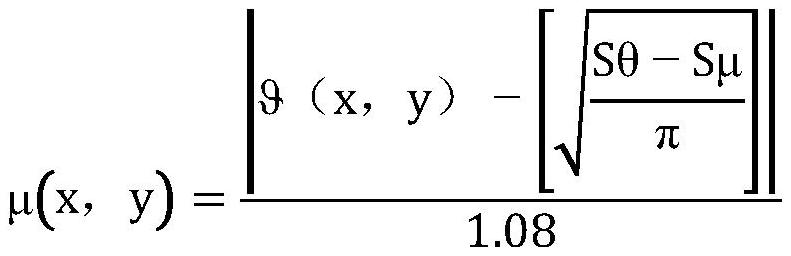
[0020] Specific embodiment two: the screw hole coordinate acquisition module is used to acquire the coordinates of the screw holes to be screwed into, and the acquisition is obtained in the following manner:
[0021]
[0022] Among them, μ(x, y) is the coordinate of the center of the screw hole to be screwed into, is the center coordinate of the sample screw hole (preset in the program), Sθ is the area of the sample screw hole (preset in the program), Sμ is the area of the screw hole to be screwed into (actual measurement), and 1.08 is the tolerance ratio (empirical value).
[0023] The sample screw hole area is the standard area of the current screw type.
specific Embodiment approach 3
[0024] Specific embodiment three: the screw tightening determination module is used to judge whether the screw tightening is qualified according to the information monitored by the screw tightening monitoring module, and judge by the following methods:
[0025] When the screwdriver torque reaches the preset lower limit, determine whether the number of tightening circles is within the qualified range of the preset number of tightening circles: if it is less than the qualified range of the preset tightening circles, continue to tighten. If the number of tightening turns does not reach the qualified range of the preset tightening turns after setting the upper torque limit, it is judged as unqualified; if it reaches the lower limit of the qualified range of the preset tightening turns, and the torque does not exceed the preset torque upper limit, it is judged as qualified and End the judgment; if it exceeds the qualified range of the preset tightening circles, it will be judged as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More