

Rigidity-adjustable force measuring branch and corresponding parallel multi-dimensional force sensor
An adjustable and rigid technology, applied in the field of force sensors, can solve the problem of uneven force on the force measurement branch, and achieve the effect of ensuring measurement accuracy, improving measurement accuracy, and uniform force
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0042] Example 1 A force-measuring branch with adjustable stiffness
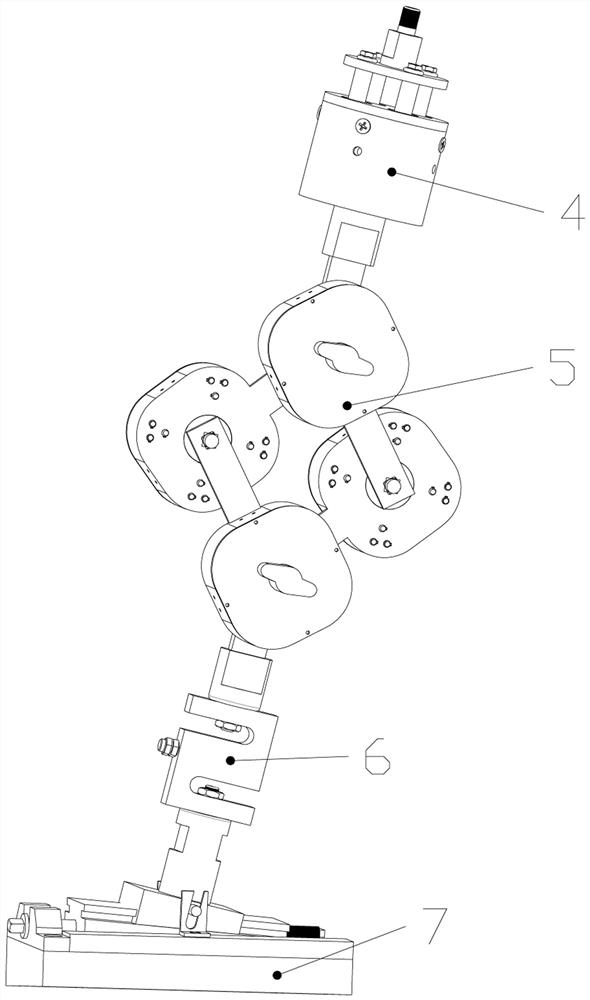
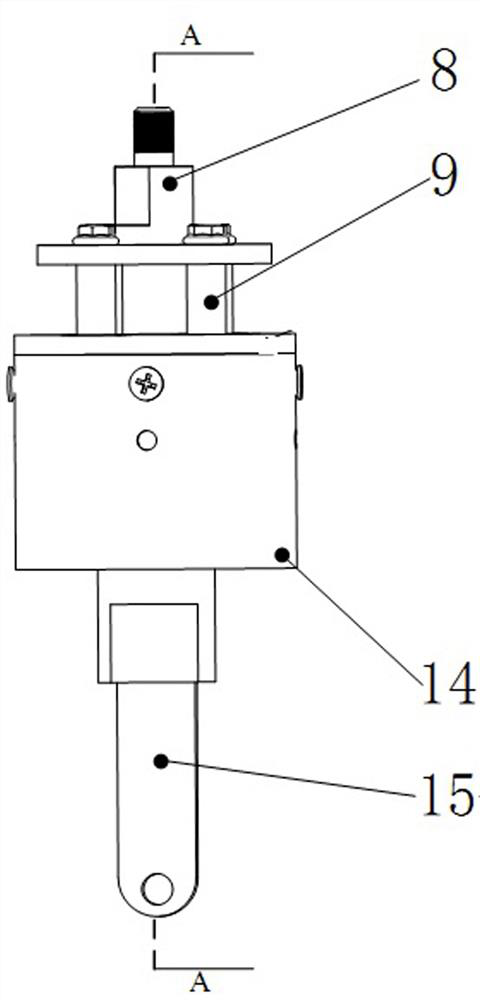
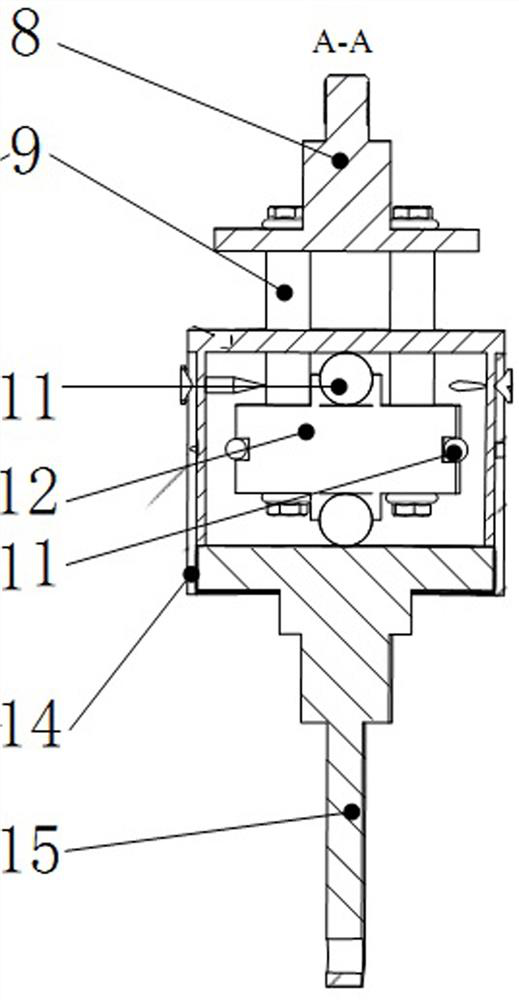
[0043] This embodiment is an invention for improving the force-measuring branch of the existing multi-dimensional force sensor 6, and its main improvement is to improve the force-measuring branch into a control method with adjustable stiffness. That is, the received force is decoupled into three orthogonal forces through the decoupling mechanism 4, the force distribution relationship of the force measuring branch is adjusted through the stiffness adjustment mechanism 5, and the length compensation mechanism 7 is used to compensate for the length change in the stiffness adjustment mechanism 5. Displacement, so that the overall length of the force-measuring branch remains unchanged, and finally achieve the purpose of transformable and adjustable stiffness of the force-measuring branch. Such as Figure 1 to Figure 8 As shown, this embodiment includes a decoupling mechanism 4 , a stiffness adjustment mechanism ...
Embodiment 2
[0058] Embodiment 2 A parallel multi-dimensional force sensor with adjustable stiffness
[0059] Such as Figure 9 As shown, this embodiment includes a force-bearing platform 1, a fixed platform 3, and at least one group of the force-measuring branches 2 with adjustable stiffness in Embodiment 1 arranged in parallel. The fixed platform 3 can be used to be connected with the main body of the robot. The force-bearing platform 1 can be used for installing props, grasping and other robots that need to measure the force-bearing parts. The top end of the upper connector 8 of the decoupling mechanism 4 is fixed on the force platform 1 , and the bottom end of the base 24 of the length compensation mechanism 7 is fixed on the fixed platform 3 .
[0060] When using this embodiment to measure multi-dimensional force, the force on the force platform 1 will map the force to each stiffness-adjustable force-measuring branch 2, and read out each stiffness through the force sensor 6 on each ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More