

Deep reinforcement learning intelligent vehicle behavior decision-making method based on path planning
A technology of reinforcement learning and path planning, applied in vehicle position/route/height control, motor vehicles, two-dimensional position/course control, etc., can solve the problem that the agent cannot learn, and improve the actual generalization ability, The effect of narrowing the gap and simplifying the system architecture
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0040] The specific implementation of the present invention will be described in detail below in conjunction with specific embodiments.
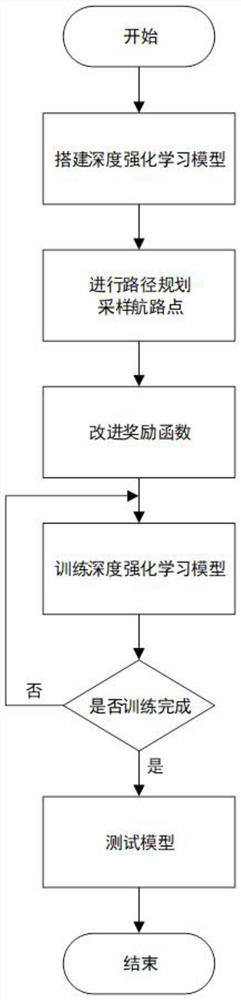
[0041] In one embodiment of the invention, see figure 1 , the described a kind of deep reinforcement learning intelligent car behavior decision-making method based on path planning comprises the following steps:
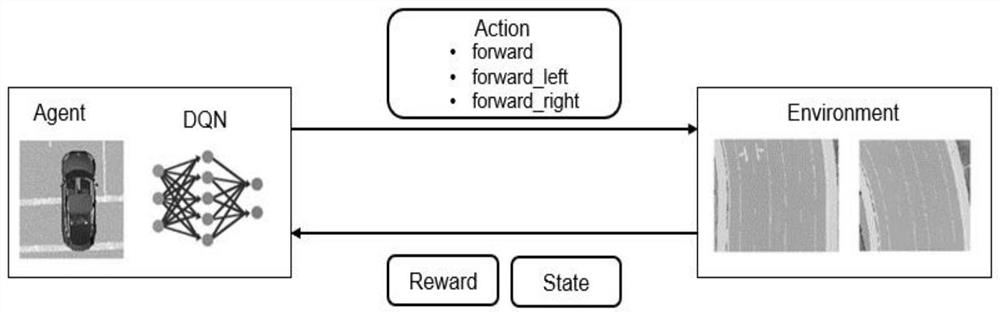
[0042] S1. Model the task as a Markov decision process;
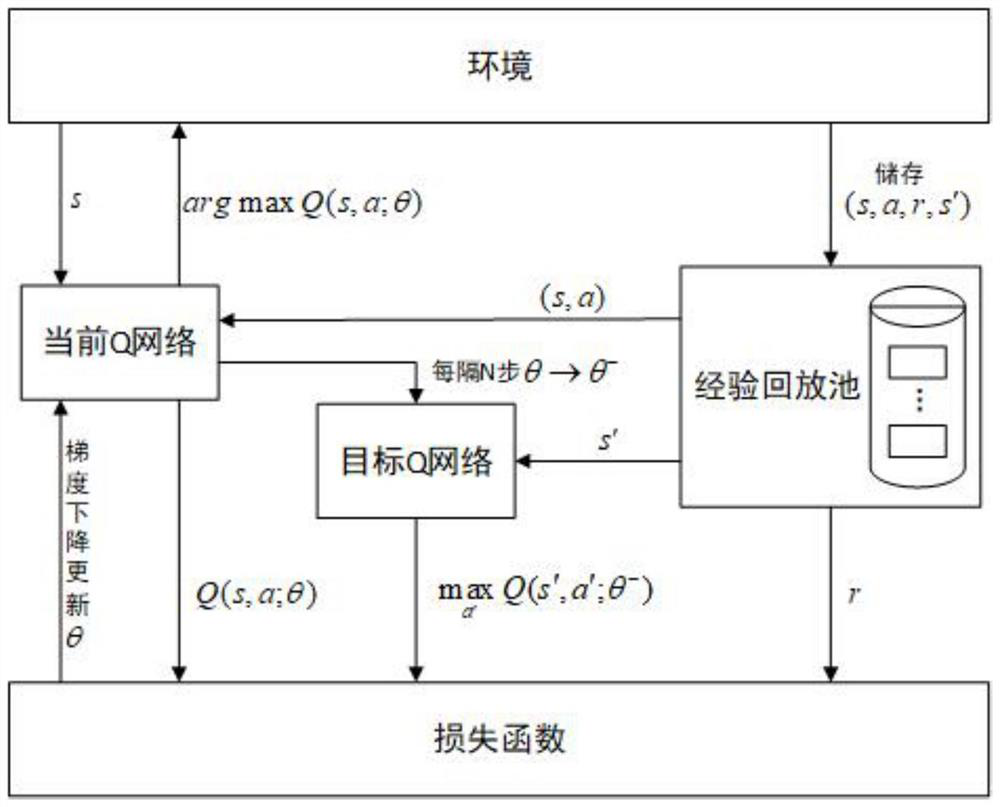
[0043] S2. Build a deep reinforcement learning algorithm;
[0044] S3. Intelligent body input design;
[0045] S4. Intelligent body output design;
[0046] S5. Building a training network st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More