

Submergence assisted geomagnetic anomaly inversion velocity measurement/underwater continuous positioning method
A technology of geomagnetic anomaly and positioning method, which is applied in the direction of using a device that measures the time required to move a certain distance, ground navigation, and navigation through speed/acceleration measurement, etc. interference, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
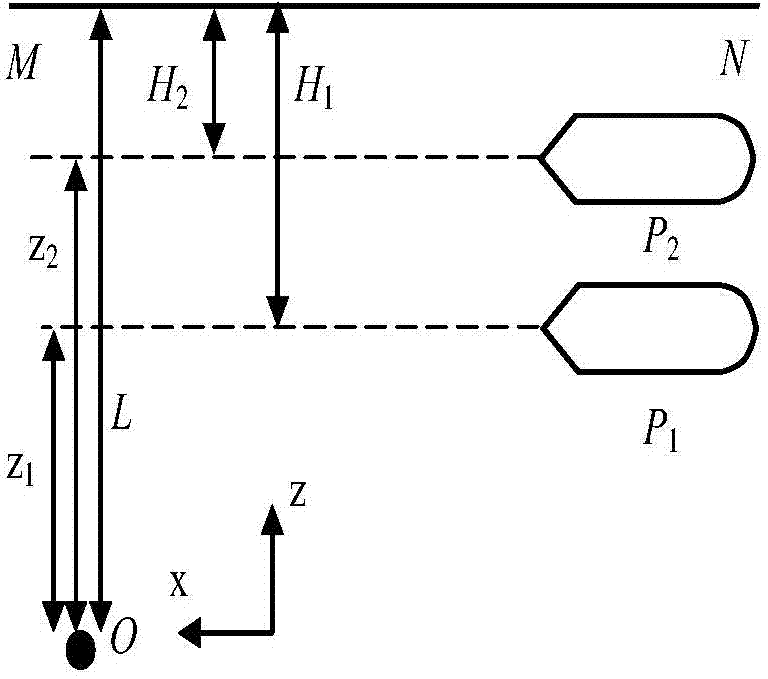
[0037] Attached below Figure 1~4 The present invention is described in detail:
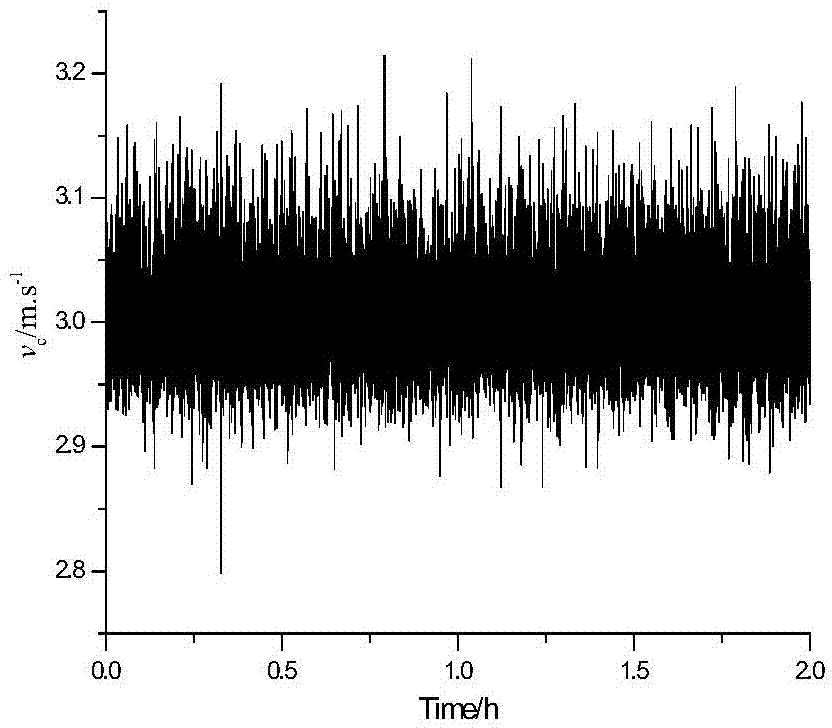
[0038] The present invention relates to a depth-assisted geomagnetic anomaly inversion speed measurement / underwater continuous positioning method. The three-axis magnetometer group strapped down to the underwater vehicle measures the dipole target magnetic field gradient tensor, and is strapped down to the measurement of the underwater vehicle. The carrier submerged depth of the deep instrument, the position of the carrier relative to the target magnetic field is obtained from the relationship between the dipole target magnetic field gradient tensor and the carrier submerged depth and the position of the carrier, and the distance of the carrier relative to the target magnetic field is further obtained, and the positioning distance at different times is used to calculate Carrier ground speed. According to the gradient tensor of the target magnetic field and the relationship between the relative p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More