Vehicle and vehicle pre-collision detection method and device
A detection method and pre-collision technology are applied in the field of vehicle and vehicle pre-collision detection, which can solve the problems of inaccurate pre-collision prediction and large deviation of the yaw angle of the body, and achieve accurate yaw angle of the body, small amount of calculation, and improved efficiency. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
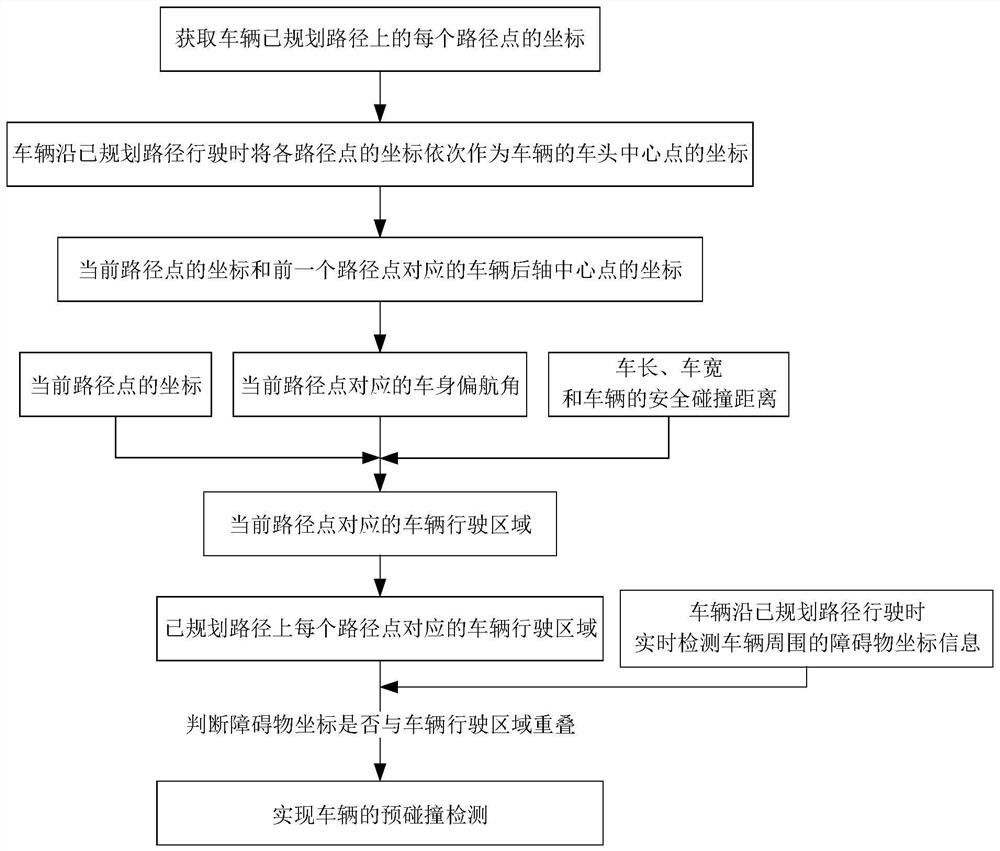
[0028] Such as figure 1 As shown, the vehicle pre-collision detection method of the present embodiment includes the following steps:
[0029] (1) Obtain the coordinates of each path point on the planned path of the vehicle. When the vehicle is driving along the planned path, the coordinates of each path point will be used as the coordinates of the center point of the vehicle's head in turn (here, it is assumed that the vehicle can well understand the path. track);
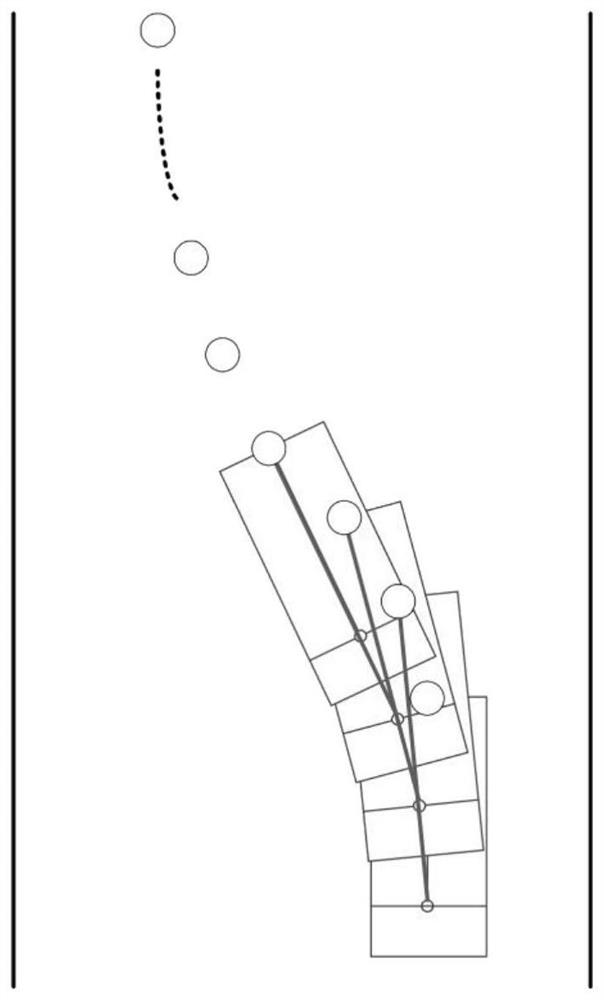
[0030] (2) Calculate the vehicle driving area corresponding to each way point on the planned route;
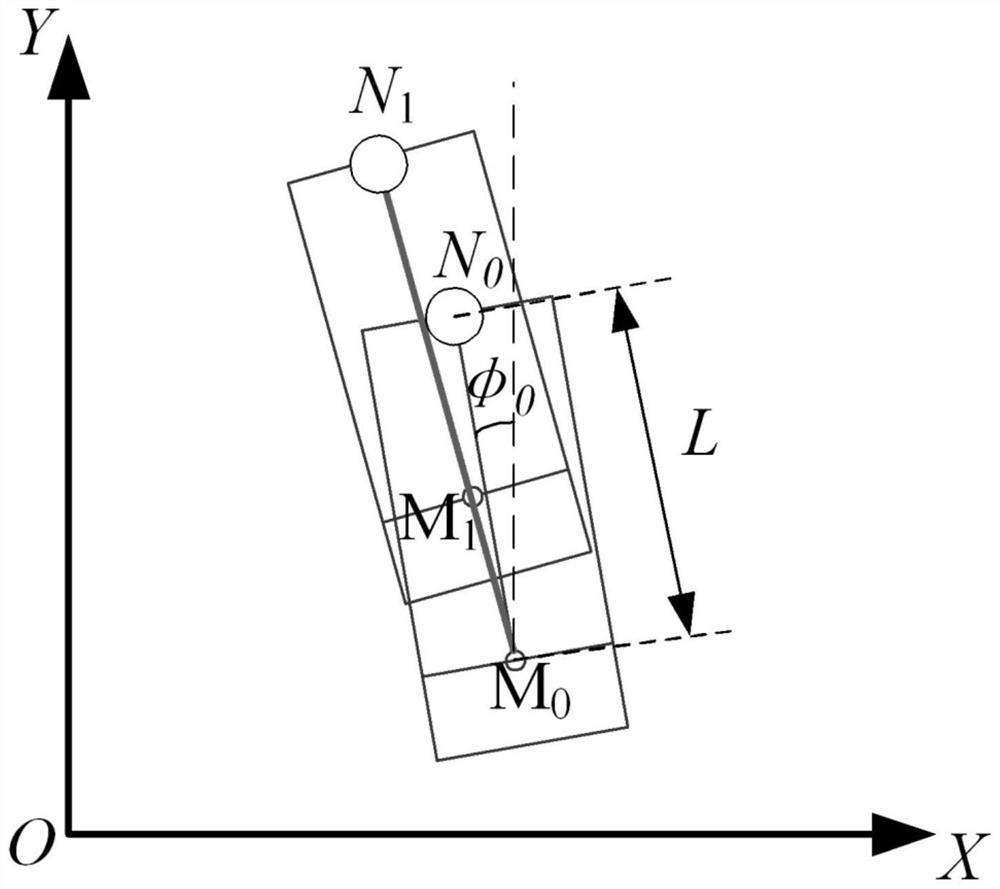
[0031] In this embodiment, the center point of the front of the vehicle is used as the path tracking point, that is, the coordinates of each path point on the planned path are used as the coordinates of the center point of the vehicle in turn when the vehicle is running along the planned path. Next, due to the large size of the vehicle body, when the center point of the front of the vehicle moves from the current...
Embodiment 2
[0050] Such as Figure 4 As shown, the vehicle pre-collision detection method of the present embodiment includes the following steps:
[0051] (1) Obtain the coordinates of each path point on the planned path of the vehicle, and use the coordinates of each path point as the coordinates of the front center point of the vehicle in turn when the vehicle travels along the planned path;
[0052] (2) Calculate the vehicle driving area corresponding to each way point on the planned route;
[0053] In this embodiment, the center point of the front of the vehicle is used as the path tracking point, and the vehicle body yaw angle corresponding to the current path point is calculated in combination with the coordinates of the current path point and the coordinates of the vehicle rear axle center point corresponding to the previous path point, and then Combining the vehicle length, vehicle width, coordinates of the current path point and the yaw angle of the vehicle body corresponding to...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap