

Anti-impact automatic docking mechanism and method for unmanned water surface platform
An unmanned platform, automatic docking technology, applied in the direction of unmanned surface ships, motor vehicles, special-purpose ships, etc., can solve the problem that unmanned docking mechanism and self-reconfiguration technology cannot be well applied to military tasks, which consumes manpower and time. , difficult docking and other problems, to avoid docking failure, facilitate docking, and improve security.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
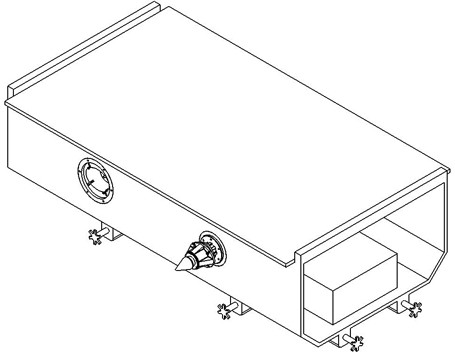
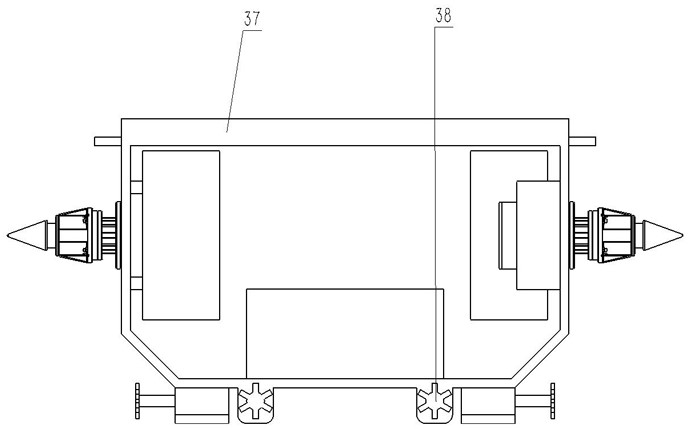
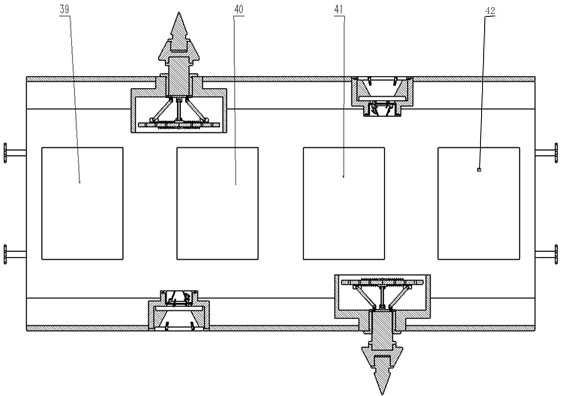
[0056] A water surface unmanned platform anti-shock automatic docking mechanism, such as Figure 1-24 As shown, including the water surface platform 37, the water surface platform 37 is an unmanned self-reconfiguration platform on the water surface, such as Figure 1-3 As shown, both sides of the water surface platform 37 are provided with docking male modules and docking female modules; the water surface platform 37 is also provided with a control module 40 , a thruster 38 , a communication transmission module 42 , an energy module 39 and a sensor module 41 .
[0057] Such as Figure 1-4 , Figure 9 As shown, the docking male module includes a docking male installation box 5 fixedly connected to the water surface platform 37, the docking male installation box 5 is a stepped cylindrical structure, the front end of the docking male installation box 5 is small, and the rear Larger end. The docking male module also includes a docking guide shaft 2, the rear end of the docking ...
Embodiment 2
[0064] This embodiment is the method of the anti-shock automatic docking mechanism of the unmanned water surface platform in Embodiment 1, including a docking method and a release method; the control module 40 includes a line-of-sight guidance controller, and the sensor module 41 includes a visual positioning device; the docking method includes the following steps:
[0065] Step 101, sending the position and course of the target to the communication transmission module 42, judging the current position of the surface platform 37, if the current position meets the control requirements close to the final waypoint, then perform dynamic positioning control, so that the surface platform 37 maintains the current position; If the control requirements are not satisfied, the position information of the target is transmitted to the line-of-sight guidance controller in the control module 40, and motion planning is performed to calculate the yaw angle and the distance relative to the target ...
Embodiment 3
[0077] A method for adopting the anti-shock automatic docking mechanism of the water surface unmanned platform in embodiment 1, the main steps are as follows:
[0078]Step 301, generation of multi-target command sequence based on discretization: the cluster formation formed by the surface platform 37 receives a "one" formation command, which needs to be assigned to a specific cluster during the project implementation process Formation; for a cluster with multiple modules (the modules in this embodiment refer to the water surface platform 37), it needs to be converted into multiple target instructions based on the "one" word formation instruction; first, the left and right sides of the "one" word formation Both ends have corresponding latitude and longitude data, based on which the data equation of the formation and the independent variable area can be obtained; by using the equidistant discretization method, the latitude and longitude and heading angle command data of multiple ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More