Six-degree-of-freedom self-adaptive pose adjustment docking device and method based on gas spring
A posture adjustment and docking device technology, applied in climate sustainability, electric vehicle charging technology, metal processing equipment, etc., can solve the problem of high automation and reliability requirements, inability to ensure reliable plug-in and unplug state, and inability to complete precise docking and other problems, to achieve the effect of shortening the adjustment time, simple and convenient on-site layout, and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
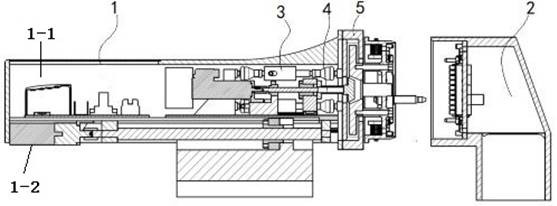
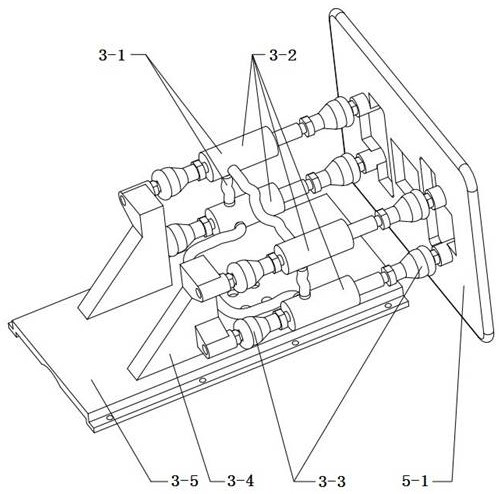
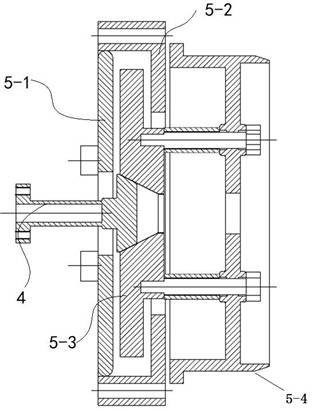
[0073] Such as figure 1 As shown, it is a schematic diagram of the overall layout of this embodiment to realize the docking of two devices. The gas spring-based six-degree-of-freedom adaptive pose adjustment docking device includes a supply-end outer frame 1, a receiving-end outer frame 2, and an adaptive unit 5. Supply end, receiving end, guide unit, calibration device 4, pneumatic device 3, driving mechanism, locking mechanism, electrical component compartment 1-1, docking drive device 1-2.
[0074] Wherein, the electrical component cabin 1-1 is located inside the rear end of the supply end, and is used for installation of all electrical control components such as power supply, driver, and controller on the docking device.
[0075] Among them, the guide unit includes a guide pin on the supply end and a guide pin hole on the receiving end. When docking, the docking drive device 1-2 drives the supply end to move toward the receiving end. The guide pin adopts a multi-stage guid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More