

High-precision rapid transposition method suitable for four-axis inertial platform system
A high-precision, axis-inertial technology, applied in directions such as navigation through velocity/acceleration measurement, to achieve the effect of shortening launch preparation time, high precision, and shortening indexing time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
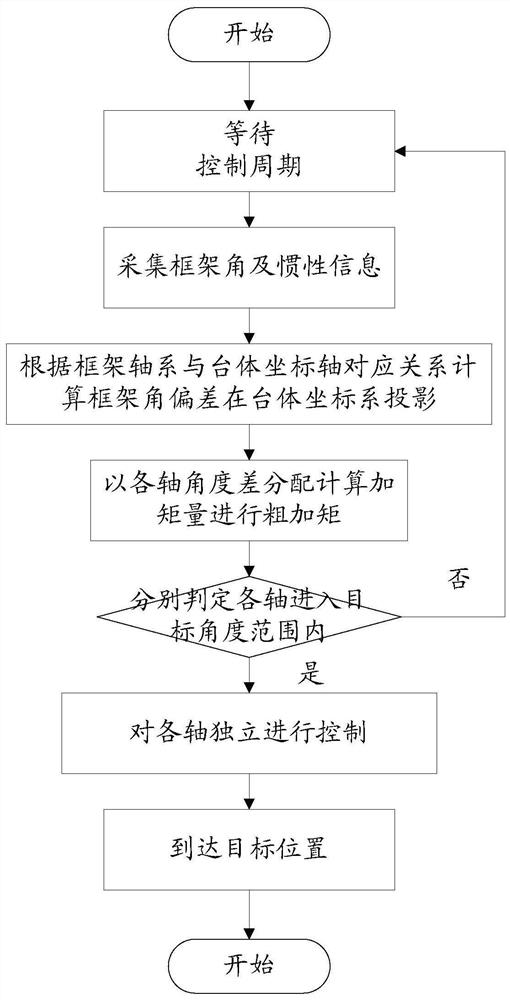
[0090] In this embodiment, the high-precision and fast indexing method applicable to the four-axis inertial platform system is as follows:
[0091] a. First input the expected target position (follower axis, outer ring axis, platform axis) frame angle value. In this example the expected value of the frame angle θ FDy’ , θ FDx , θ FDz are (210,0,0) respectively.
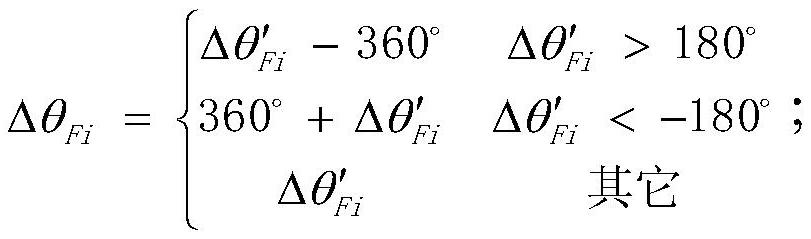
[0092] b. The control software collects the real-time position θ of the current frame angle once every control cycle Fi , according to θ Fi with frame angle expectation θ FDi Use formulas (1) and (2) to calculate the frame angle deviation value Δθ Fi .
[0093] The position θ of the current frame angle collected in this example Fy’ , θ Fx , θ Fz (follower axis, outer ring axis, platform axis) is (20,310,110), then:
[0094]
[0095] Considering the requirements of negative feedback control comprehensively, there is a frame angle deviation:
[0096]
[0097] c. In this embodiment, the follow-up ring w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More