

Navigation escape method for swarm robots under coverage of complex environment area
A complex environment and area coverage technology, applied in the field of navigation and escape, can solve problems such as deadlock and low coverage efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
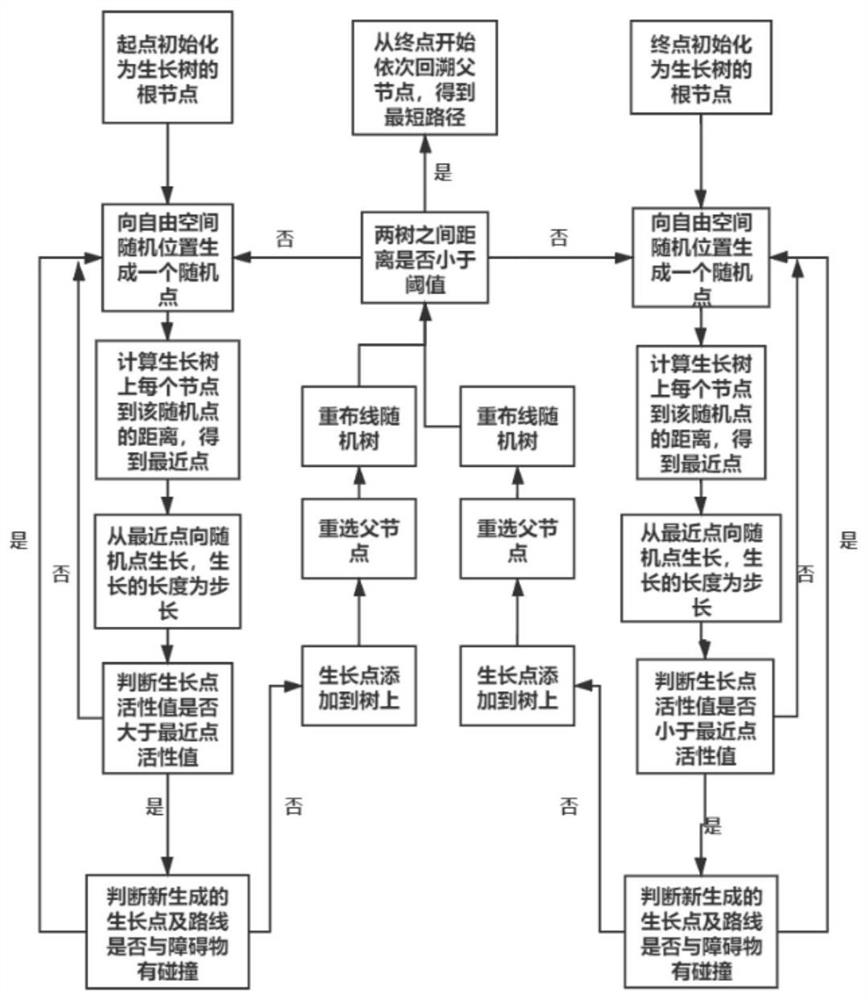
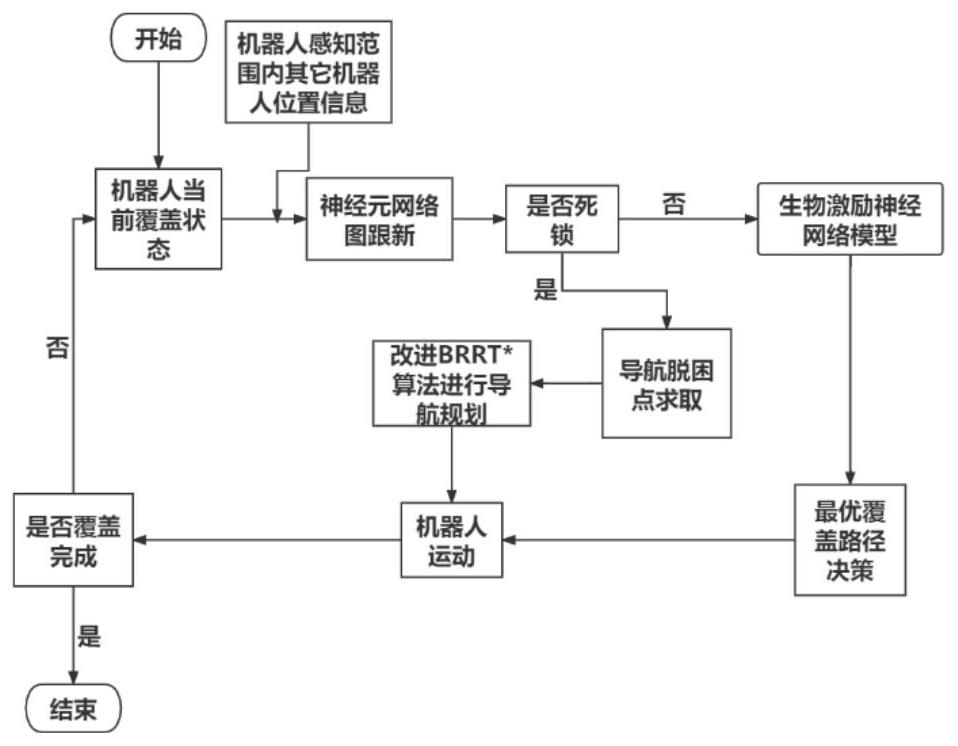
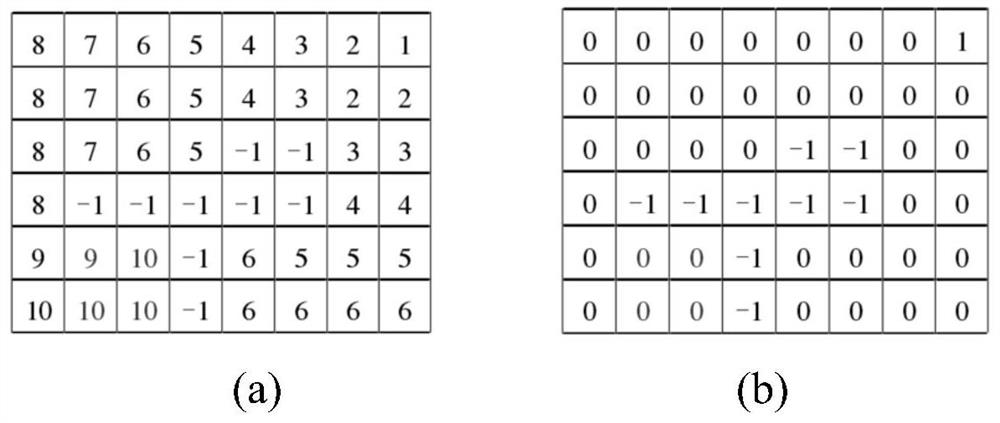
[0037] The invention proposes a navigation and escape mechanism suitable for unknown environments and with less calculation to make the robot escape from deadlock. When the robot falls into a deadlock in the process of area coverage, the optimal navigation point for the robot is found by introducing the cellular automaton mechanism, and the path planning is carried out by improving the BRRT* (Bidirectional Rapidly Extended Star) navigation algorithm to make the robot escape from the dead zone, thereby Realize the efficient coverage of complex environments by swarm robots, making it more applicable to actual environments.
[0038] In the process of area coverage, the present invention utilizes the size of the environmental stimulus to represent the coverage degree of the robot to the unknown environment, and uses the biologically stimulated neural network model to...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More