

Autonomous path planning method for plant protection unmanned aerial vehicle
A plant protection drone and path planning technology, applied in the field of plant protection drone autonomous path planning, to achieve uniform spraying, improve safety, and comprehensive coverage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The technical solutions of the present invention will be clearly and completely described below in conjunction with the embodiments. Obviously, the described embodiments are only some embodiments of the present invention, rather than all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts shall fall within the protection scope of the present invention.
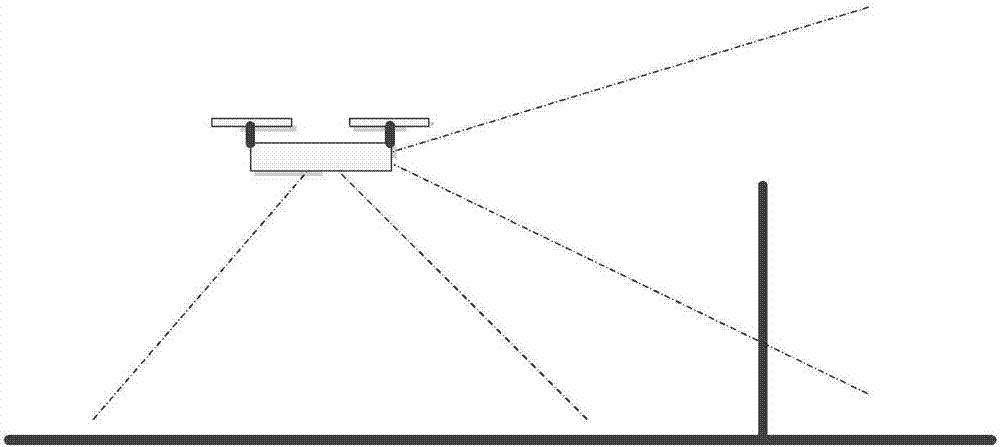
[0051] The plant protection UAV of the present invention is a rotorcraft, which includes a power module, a control module, a positioning module, a path planning module, a spraying module, and an obstacle detection module. Among them, the obstacle detection module can be composed of dual cameras, radar, infrared ranging device, etc., which can detect obstacles in front of and below the UAV.
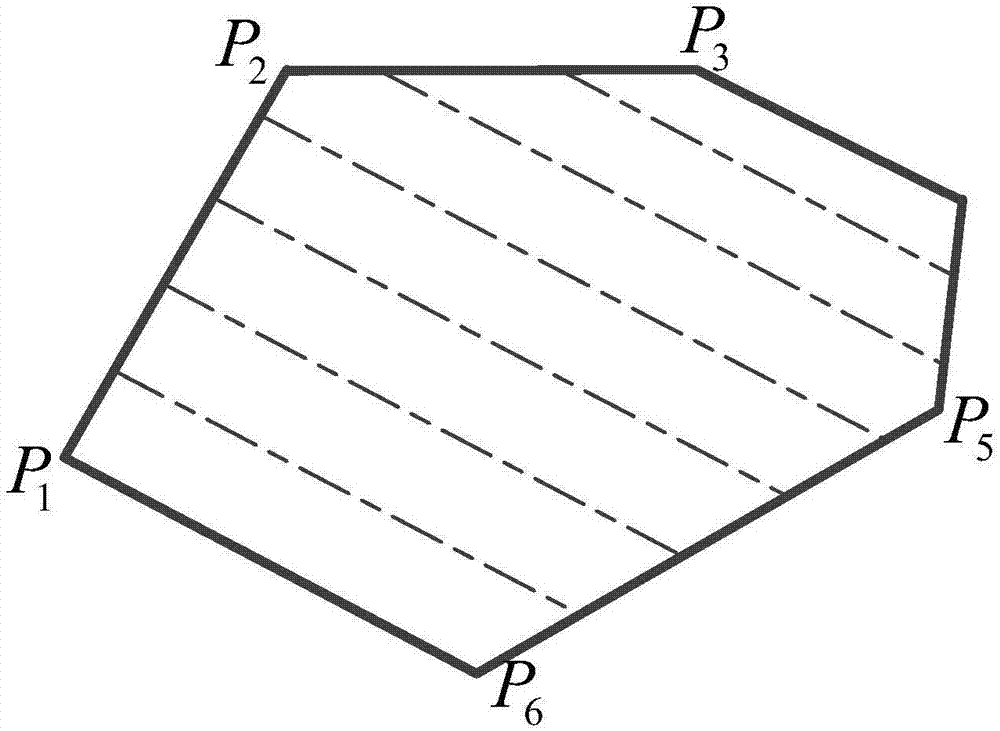
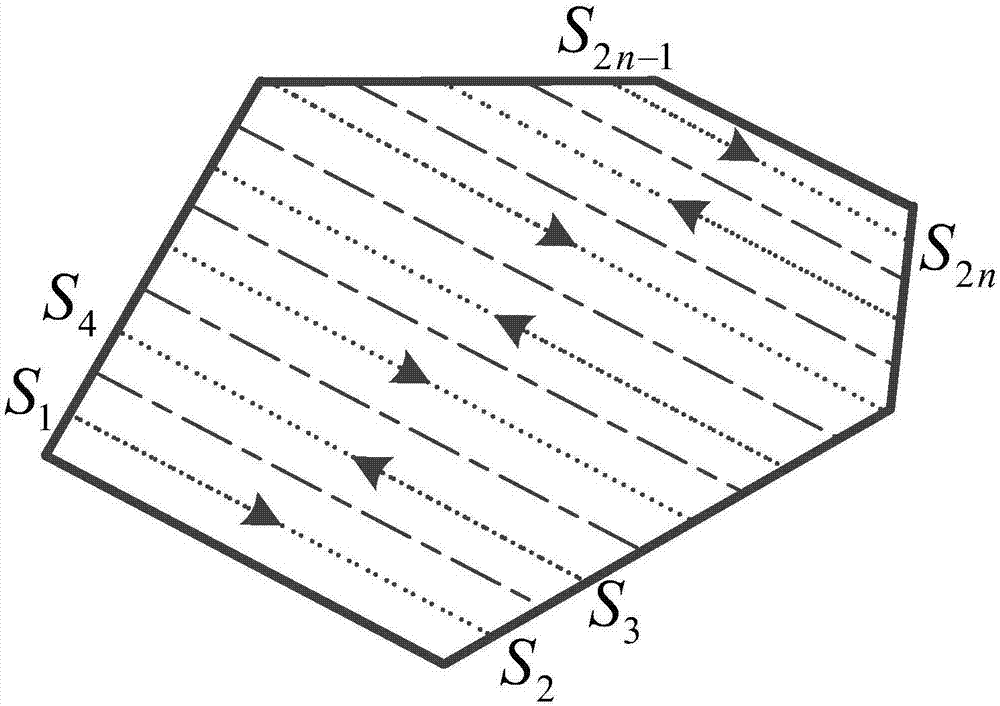
[0052] The plant protection UAV autonomous path planning method of the present invention is specifically as follows:
[005...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More