

Walking gait planning method for foot type desktop pet robot
A gait planning and robotics technology, applied in the field of robotics, can solve problems such as complex gait design, and achieve the effect of small amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
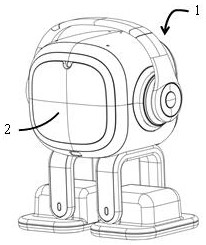
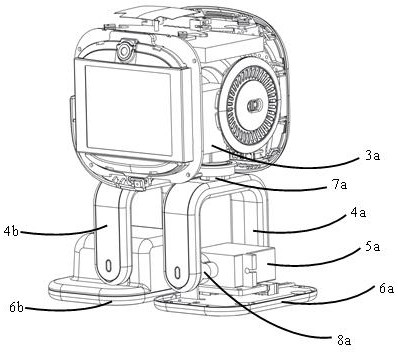
[0022] like figure 1 and figure 2 As shown, the footed desktop pet robot 1 includes a head 2, a left leg steering engine 3a, a left leg 4a, a left foot steering engine 5a, a left foot 6a, a right leg steering engine 3b, a right leg 4b, a right foot steering engine 5b, right foot 6b;
[0023] The left and right sides of the inner lower end of the head 2 are respectively fixedly connected with a left leg steering gear 3a and a right leg steering gear 3b, the rotating shaft 7a of the left leg steering gear 3a is connected to the left leg 4a by bolts, and the lower end of the left leg 4a is passed through Bolts connect the rotating shaft 8a of the left foot steering gear 5a, and the left foot steering gear 5a is fixedly connected on the left foot 6a; The rotating shaft 8b of machine, the right foot servo 5b is fixedly connected on the right foot 6b;
[0024] The walking gait planning method of the legged desktop pet robot is as follows:
[0025] The target positions of the l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More