

High-reliability adsorption type climbing robot and control method thereof
A robot and adsorption technology, applied in the direction of motor vehicles, color TV parts, TV system parts, etc., can solve the problems of inconvenient implementation and difficult maintenance, so as to improve practicability, ensure stability, and ensure climbing speed effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
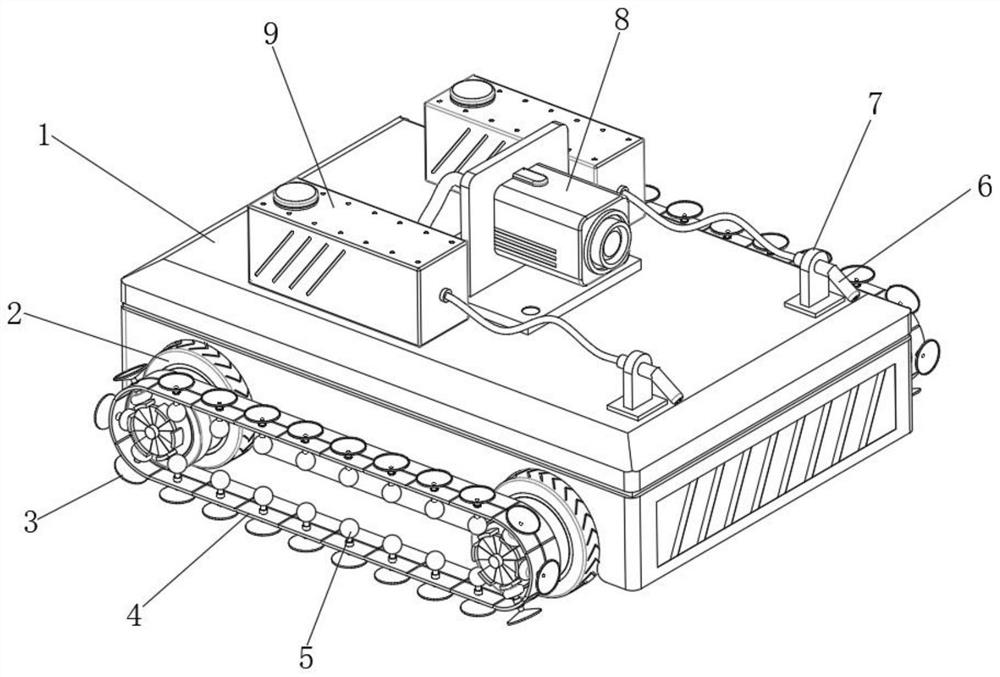
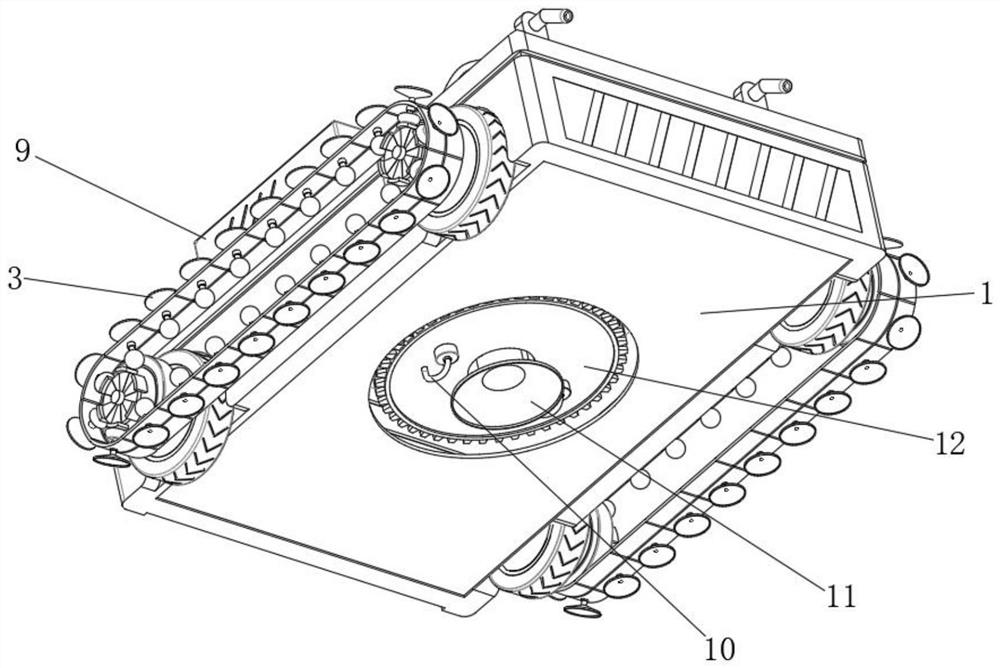
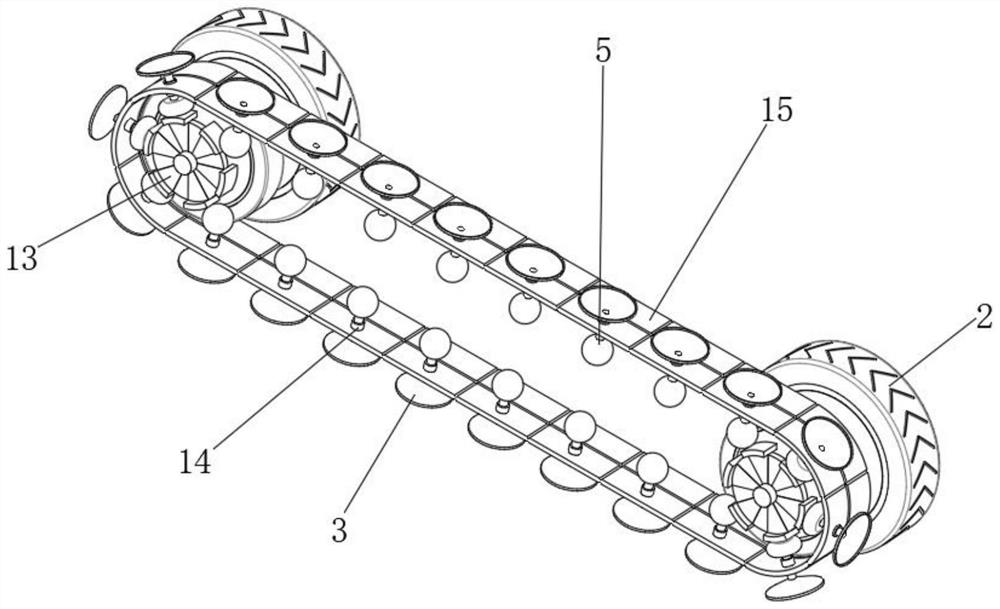
[0065] A highly reliable adsorption climbing robot, such as Figure 1-8 As shown, it includes a robot main body 1 and a driving wheel 2, the driving wheels 2 are installed on both sides of the robot main body 1, and the two sides of the robot main body 1 are provided with crawler-type adsorption mechanisms, and the crawler-type adsorption mechanisms include:
[0066] Concentric shaft 18, one end of the concentric shaft 18 is fixed on the center position of the outer wall on one side of the driving wheel 2;
[0067] Climbing track, the climbing track includes a first belt body 15 and a second belt body 4, the first belt body 15 is arranged on the outer wall of one side of the second belt body 4;
[0068] track wheel 17, track wheel 17 is fixed on the peripheral outer wall of the concentric shaft 18, and track wheel 17 forms a transmission fit with the first belt body 15;
[0069] The fixing sleeve 14 is evenly arranged on the second belt body 4;
[0070] Climbing suction cup ...
Embodiment 2
[0098] A highly reliable adsorption climbing robot, such as figure 1 As shown, in order to improve practicability; this embodiment makes the following improvements on the basis of embodiment 1: the outer wall of the top of the robot main body 1 is fixed with a third mounting frame, and the inside of the third mounting frame is equipped with a camera assembly 8; by setting the camera Component 8 facilitates understanding of the climbing situation of the climbing robot, facilitates planning and correcting the climbing path, and improves practicability.
[0099] Easy to clean climbing surfaces such as figure 1 As shown, the top outer wall of the robot main body 1 is fixed with a cleaning mechanism, and the cleaning mechanism includes:
[0100] Cleaning box 9, the cleaning box 9 is installed on the outer wall of the top of the robot body 1, and the cleaning box 9 is provided with a pump body for outputting cleaning liquid;
Embodiment 3
[0104] A method for controlling an adsorption climbing robot with high reliability, comprising the following steps:
[0105] S1: Preliminarily fix the climbing robot on the climbing surface through the climbing suction cup 3, and control the driving of the climbing robot;
[0106] S2: judging by the camera assembly 8 whether steering is required, it is necessary to transfer to step S3, and it is not necessary to transfer to step S7;
[0107] S3: The negative pressure generator 24 works to generate negative pressure in the negative pressure cylinder 23, so that the piston 35 moves downward, and then drives the lifting frame 25 to move downward so that the fixed suction cup 11 is attached to the climbing surface;
[0108] S4: Control the negative pressure generator 24 to continue to work, the piston 35 continues to move downward, the sealing sliding cylinder 32 loses its sealing effect on the air hole 33, and then the negative pressure cylinder 23 and the fixed suction cup 11 ar...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More