

Multi-agent adaptive formation control method for avoiding collision and communication interruption
A multi-agent, communication interruption technology, applied in the direction of comprehensive factory control, 3D position/channel control, etc., can solve the problem of ignoring the collision avoidance of non-neighboring agents, limitations, etc., to reduce the communication burden, improve security, improve The effect of practicality and safety
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
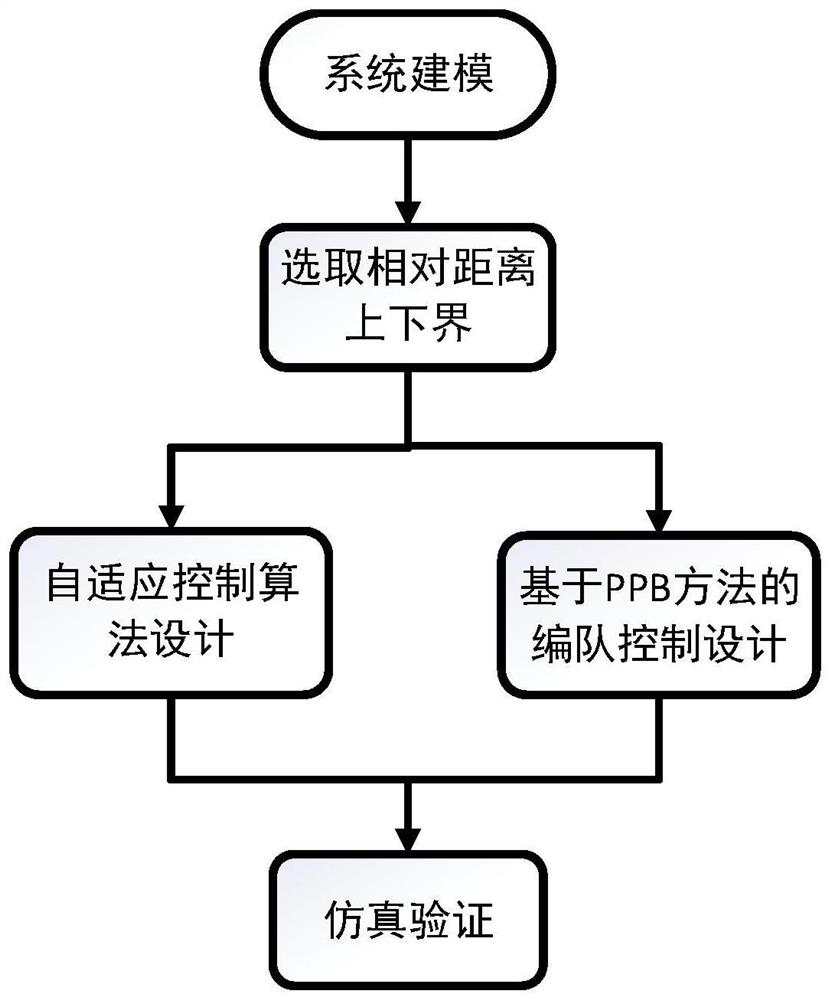
Method used
Image

Examples
Embodiment 1
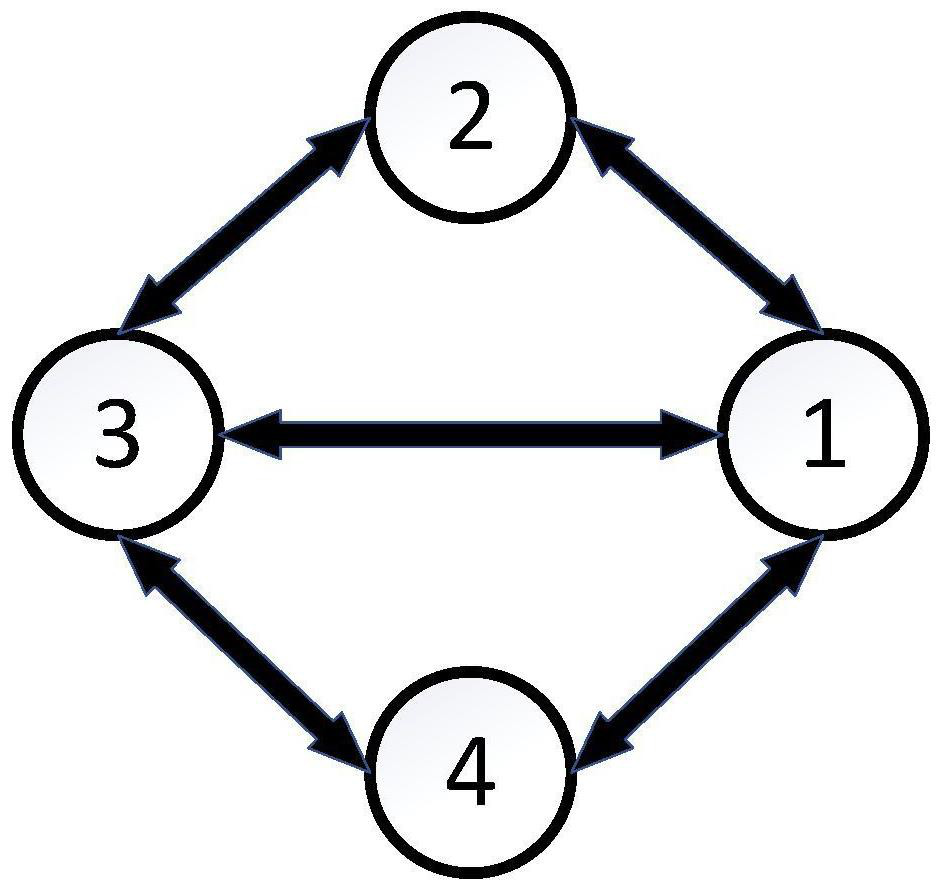
[0102] Using MATLAB software, the established multi-agent formation model and the designed adaptive controller are simulated. Pick one containing four is modeled as Formation of agents with x i,k ∈ R 2 ,k=1,2, Undirected graph such as figure 2 shown.
[0103] Let the ideal trajectory be y r (t)=[rcos(ωt) rsin(ωt)] T , where r=10m, ω=0.05rad / s, the initial state of each agent is shown in Table 1.
[0104] Table 1 initialization variables
[0105]
[0106] The control parameters and relative ideal positions of each agent are shown in Table 2:
[0107] Table 2 Other variables
[0108]
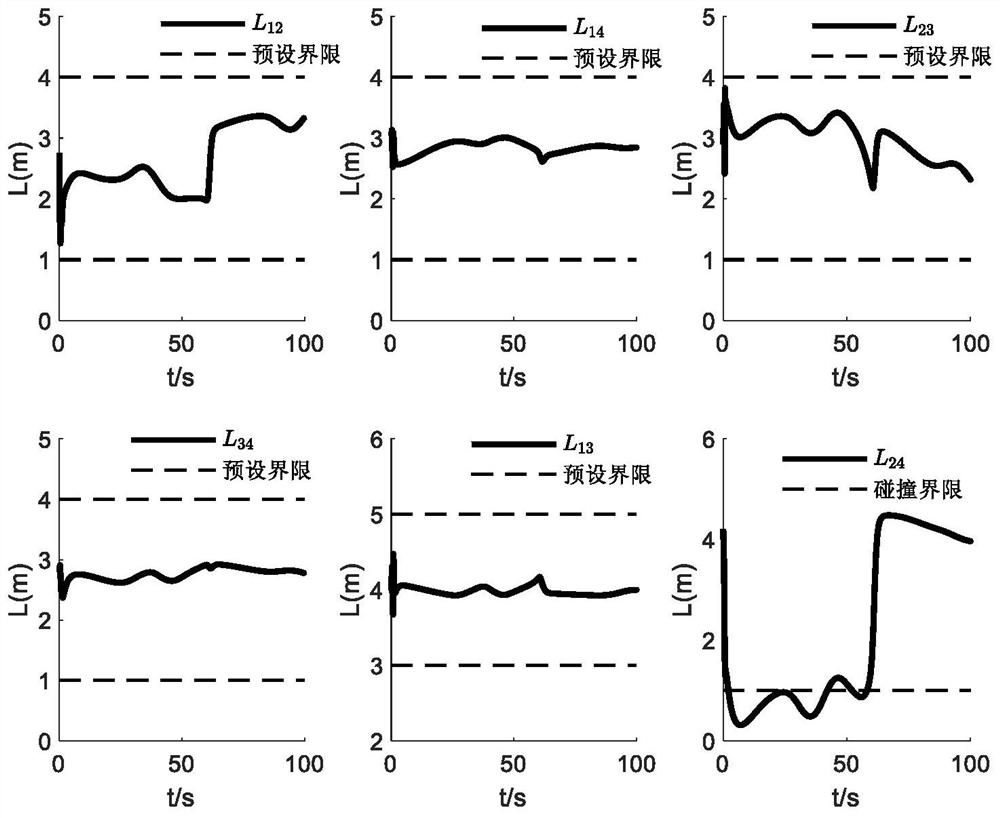
[0109] published to illustrate the invention and L ij The difference between the selection method and the existing results is explained through a group of controlled experiments. The first group below is selected according to the existing results and L ij , the second group is selected according to the method of the present invention and L ij .
[0110] Group 1: Sele...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More