

Unmanned sweeper signal lamp fusion perception recognition and control method
A control method and cleaning vehicle technology, applied in cleaning methods, satellite radio beacon positioning systems, road cleaning, etc., can solve problems such as traffic safety hazards, reduced traffic efficiency, and reduced recognition performance, so as to avoid misidentification and reduce Misrecognition rate, security improvement effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings.
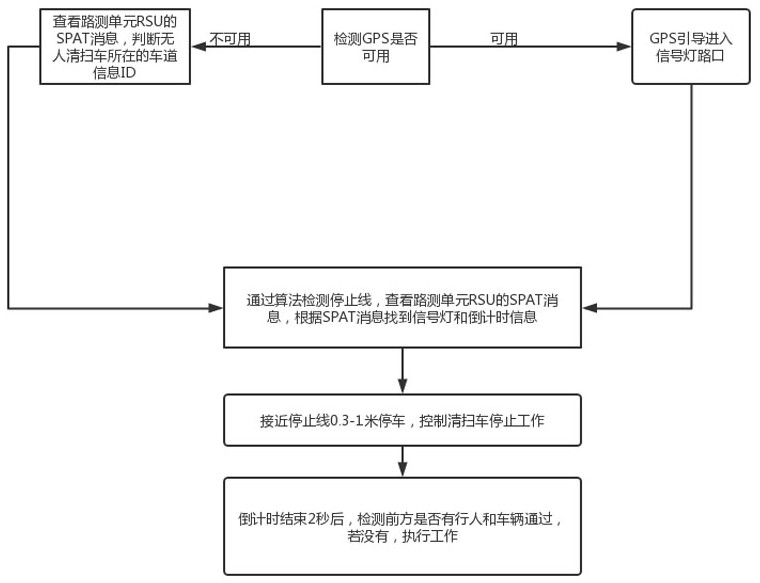
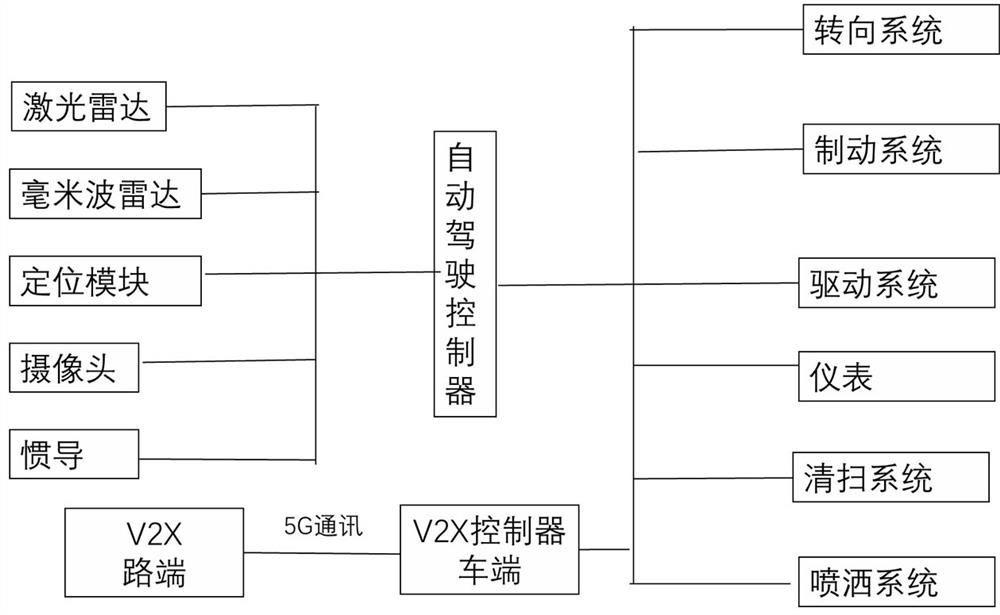
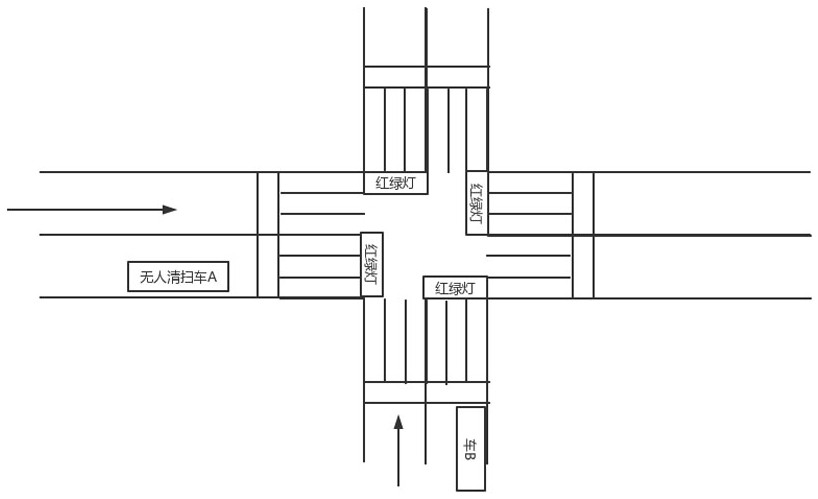
[0047] Real-time example 1: such as figure 1 , as shown in 2, first, the unmanned sweeper A identifies the signal light through V2X and the road test unit RSU, including: S1. In order to detect whether the GPS signal is available, a three-level cascaded AR model is established to approximate the ARMA model:
[0048] First level:
[0049] x t -a 1 x t-1 -a 2 x t-2 -a 3 x t-3 = u t
[0050] second level:
[0051]u t -b 1 u t-1 -b 2 u t-2 =v t
[0052] Third level:
[0053] v t -c 1 v t-1 =n t
[0054] To predict the output positioning information of GPS at the next moment in real time, according to the model established above, the formula for one-step prediction is obtained:
[0055]
[0056] Using real-time calculation of model parameters at all levels, For the position information of GPS at the next moment, the GPS output positioning inform...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More