Lightweight map making method and device for mine automatic driving
A self-driving, lightweight technology that is applied in the direction of measuring devices, instruments, surveying and navigation, etc., can solve the problems that cannot meet the requirements of light-weight map production efficiency and the cumbersome drawing process, so as to simplify the content and simplify the drawing process , Improve the effect of drawing efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
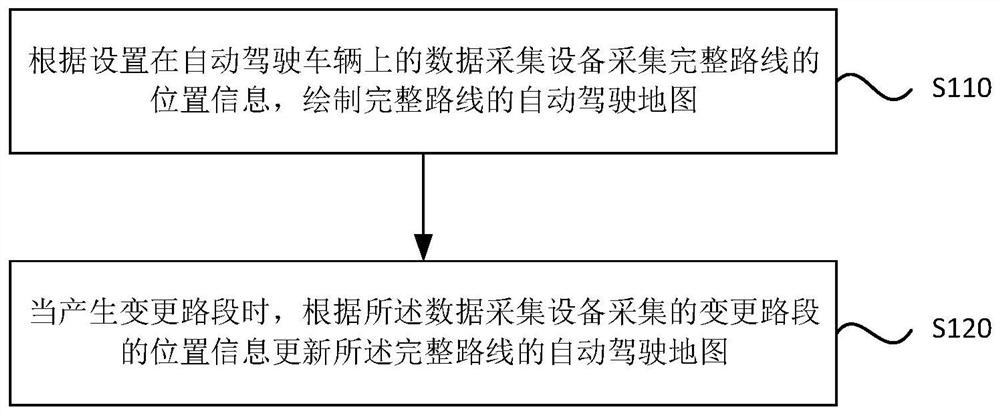
[0017] figure 1 It is a flow chart of the lightweight map making method for automatic driving in mines provided by Embodiment 1 of the present invention. This embodiment is applicable to the situation of automatic driving of vehicles in mines, and specifically includes the following steps:
[0018] S110. Collect the location information of the complete route according to the data collection device set on the automatic driving vehicle, and draw an automatic driving map of the complete route.
[0019] Wherein, the data collection device in this embodiment includes a positioning device and an inertial navigation device, and mainly collects the time, longitude and latitude of the location information during the driving process of the autonomous vehicle. Compared with the multi-sensory data acquisition equipment in the prior art, the location information can be obtained only through the positioning device and the inertial navigation device in this embodiment, which matches the scen...
Embodiment 2
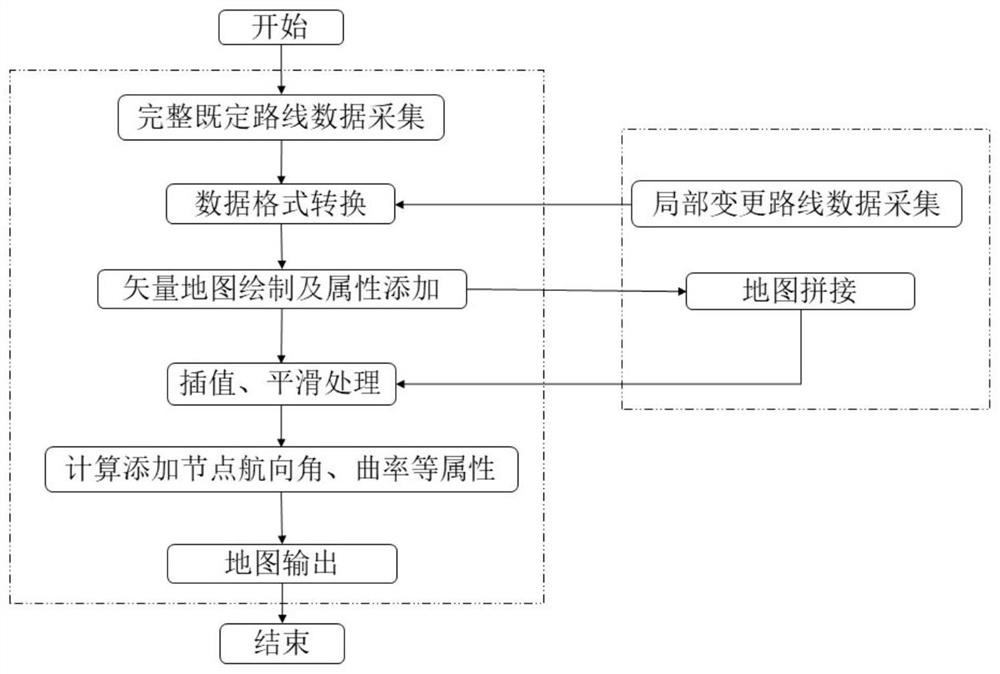
[0068] see figure 2 , the embodiment of the present invention provides an operation example of a lightweight map production method for automatic driving in mines, involving the production of a complete route map and the production of map updates caused by partial route changes.
[0069] Among them, the map making steps of the complete route are as follows:
[0070] Step 1: Let the driver drive the vehicle and drive through all the routes on the complete set task, and collect and save the position information when the vehicle drives through the complete set route through the integrated navigation device installed on the self-driving vehicle;
[0071] Step 2: convert the saved position data of the complete predetermined route into road node data in osm format and save it;
[0072] Step 3: Open the converted data through JOSM, and the complete route will be displayed on JOSM. Use the JOSM drawing tool to draw a vector map along the direction of vehicle travel, and add road att...
Embodiment 3
[0082] Embodiment 3 of the present invention also provides a lightweight map making device for automatic driving in mines, including:
[0083] The automatic driving map drawing module is used to collect the location information of the complete route according to the data acquisition equipment set on the automatic driving vehicle, and draw the automatic driving map of the complete route.
[0084] Wherein, the data collection equipment includes a positioning device and an inertial navigation device.
[0085] The location information includes: location information collection time, location longitude and location latitude.
[0086] The above-mentioned automatic driving map drawing module is specifically used for:
[0087] Converting the format of the location information data of the complete route;
[0088] Use map editing software to draw a vector map of the complete route based on the converted data;
[0089] Computational processing is performed on the vector map of the comp...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap