

Mobile robot path planning method based on improved ant colony algorithm
A mobile robot and ant colony algorithm technology, applied in the field of robotics, can solve problems such as easy to fall into local optimal solution, slow convergence speed of ant colony algorithm, etc., to enhance the optimization ability, avoid local optimal solution, and speed up the convergence speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
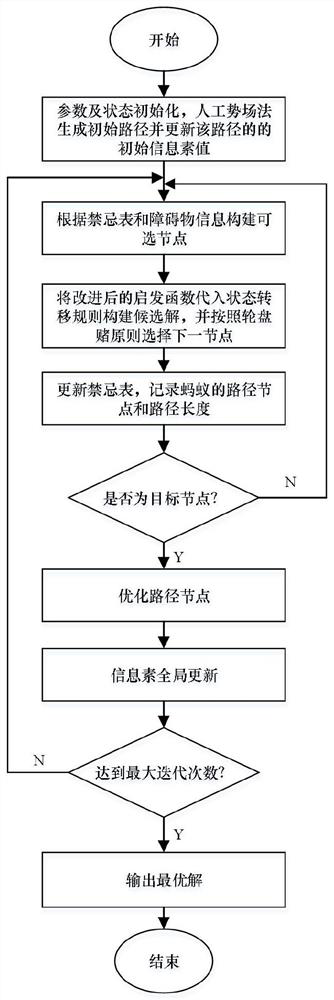
[0057] A kind of mobile robot path planning method based on improved ant colony algorithm of the present invention, flow chart is as follows figure 1 As shown, it specifically includes the following steps:
[0058] S1: Establish a grid map, determine the starting node, target node and obstacle information.
[0059] S2: Initialize the parameters of the ant colony algorithm, generate the initial path according to the artificial potential field method, update the initial pheromone matrix of the path, and initialize the taboo table.
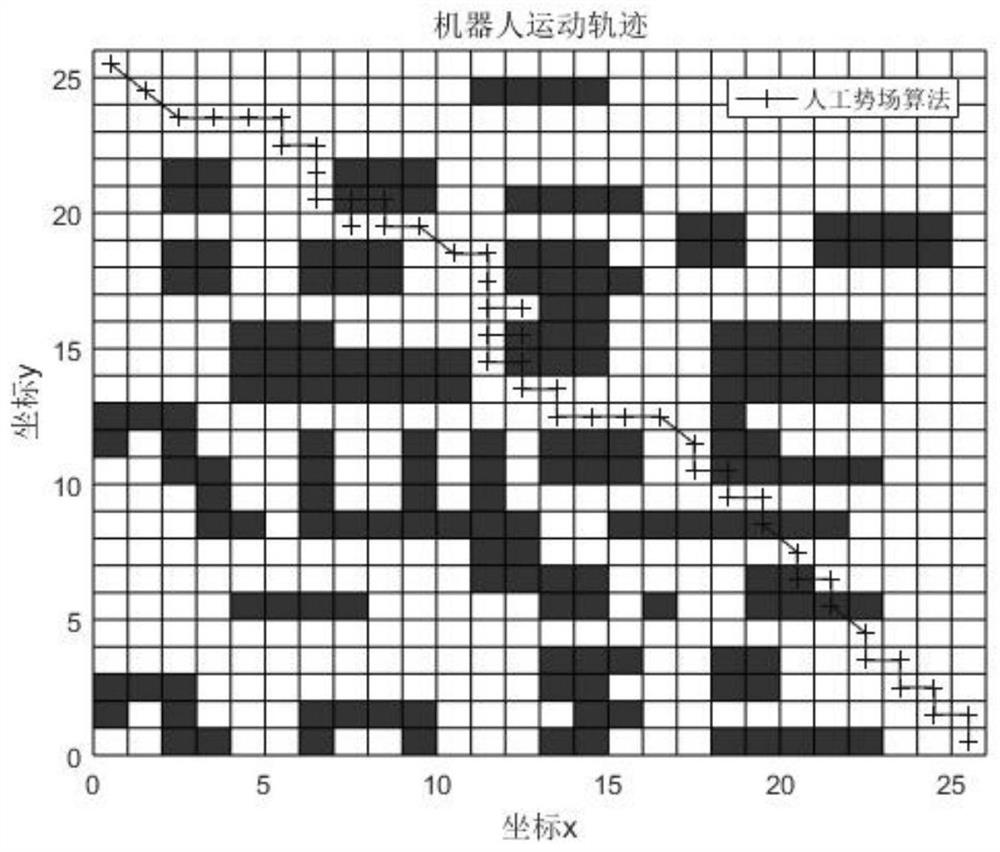
[0060] Specifically, the artificial potential field method is affected by the gravitational force of the target node and the repulsive force of obstacles during the path planning process, thereby quickly generating a path. The gravitational field function and repulsive field function are shown in the following formula:
[0061] u att (X) = 0.5αρ 2 (X,X g )
[0062]
[0063] In the formula, X=(x, y) is the position vector of the robot, α and β...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More