

High-precision map construction method and device, storage medium and electronic equipment
A map construction, high-precision technology, applied in image analysis, image data processing, instruments, etc., can solve problems such as inaccurate depth values, and achieve the effect of improving construction accuracy and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
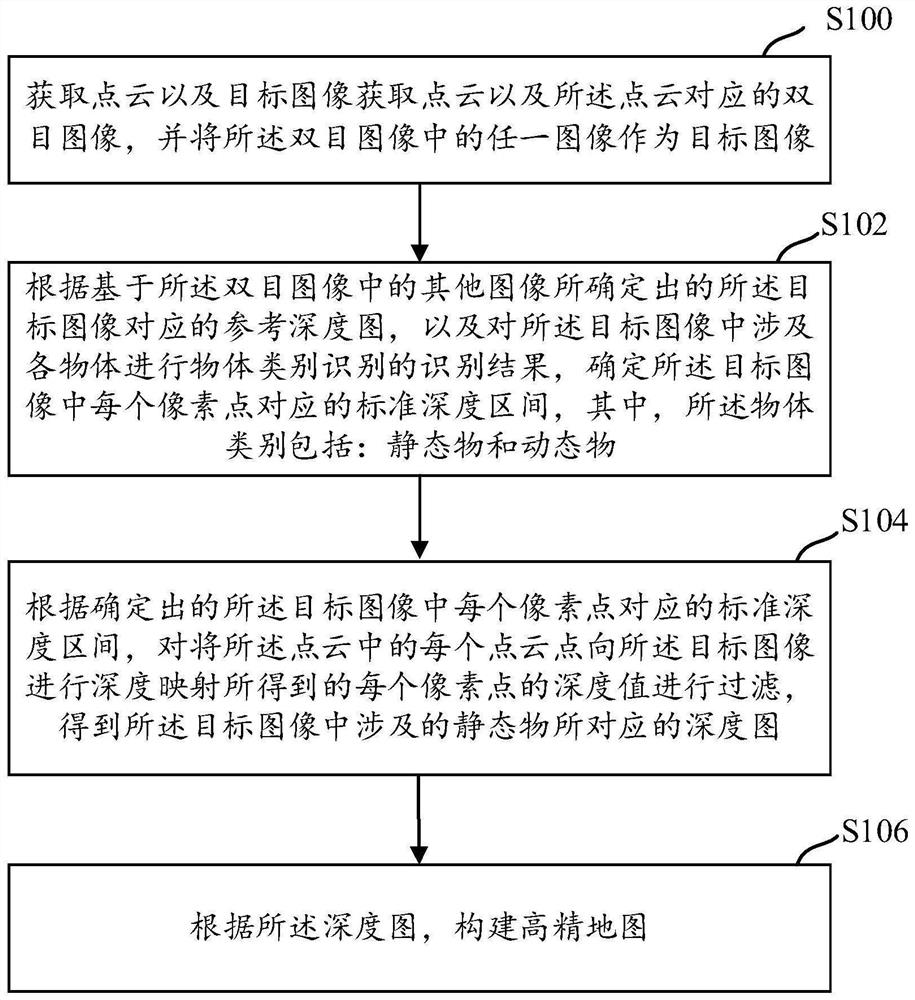
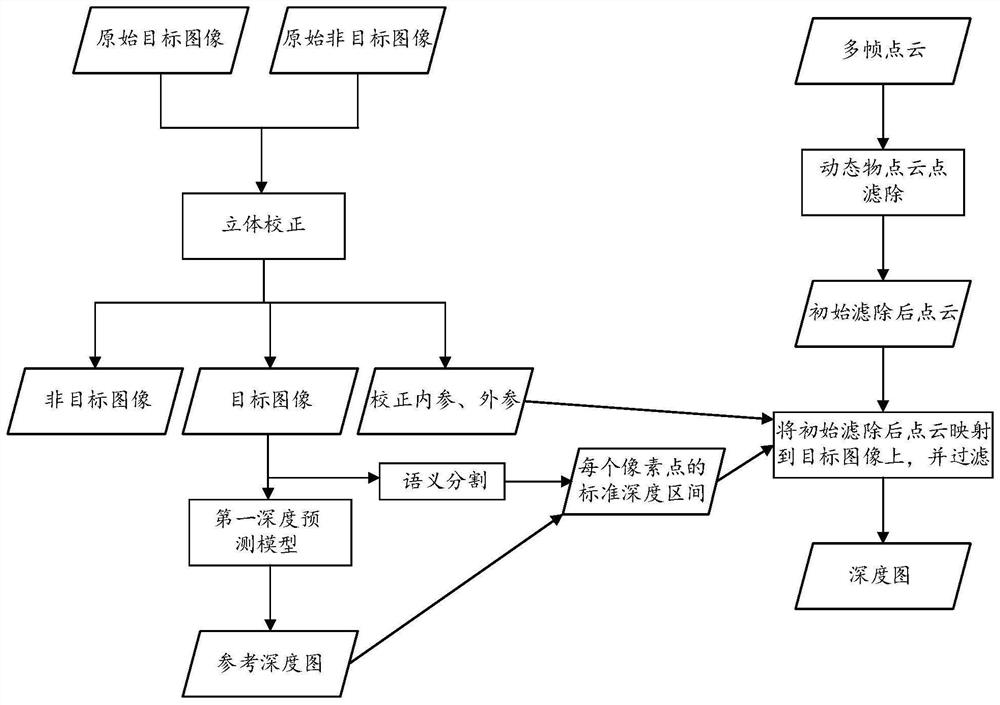
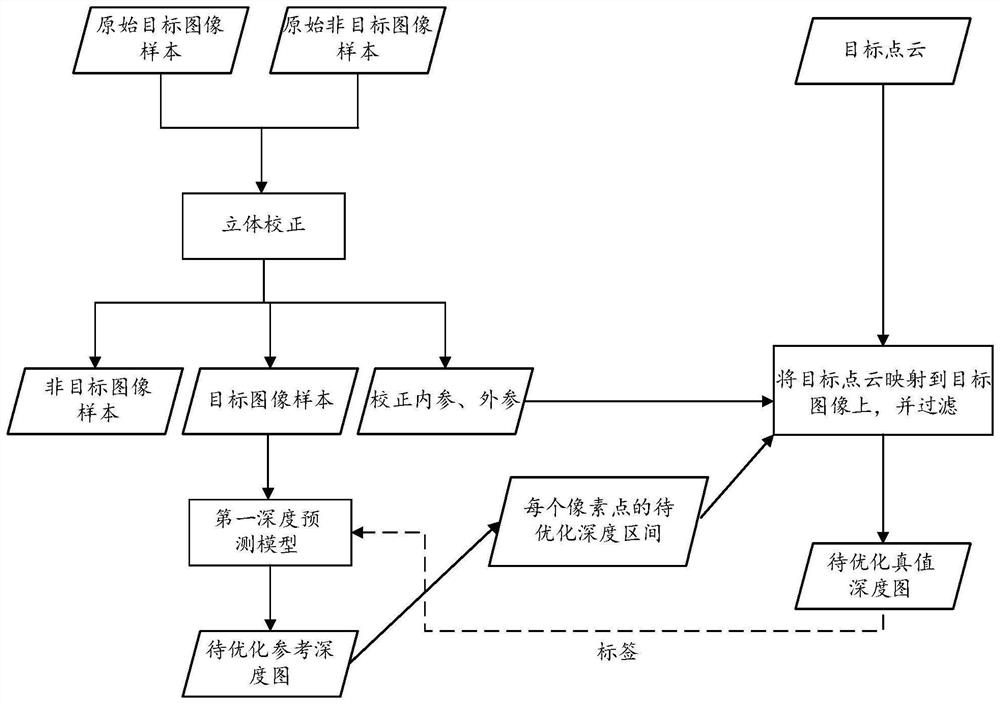
[0050] The high-precision map construction method provided in this specification is intended to determine the standard depth area corresponding to each pixel point in the target image according to the reference depth map corresponding to the target image in the binocular image, and the identification result of the object category in the target image. Then, according to the standard depth area corresponding to each pixel point, the depth value of the different point cloud points is filtered on the same pixel point, and the depth value of the point cloud point mapping of the static is obtained. Finally, the depth map is constructed based on the depth value of the point cloud point map corresponding to each pixel point. In this way, only the depth value of the point cloud point mapping of the static object is retained in the depth map.
[0051] In order to make the objects, technical solutions and advantages of this specification, the technical solutions of the present specification ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More