

Landform map construction method convenient for efficient navigation of autonomous mobile robot
A technology for mobile robots and autonomous movement, applied in navigation, surveying and navigation, road network navigators, etc., can solve problems such as inaccurate and unreasonable path planning, high consumption of mobile robots, and neglect of landform costs, etc., to improve the speed of landform segmentation , enhance the extraction ability, and reduce the effect of parameters
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0041] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
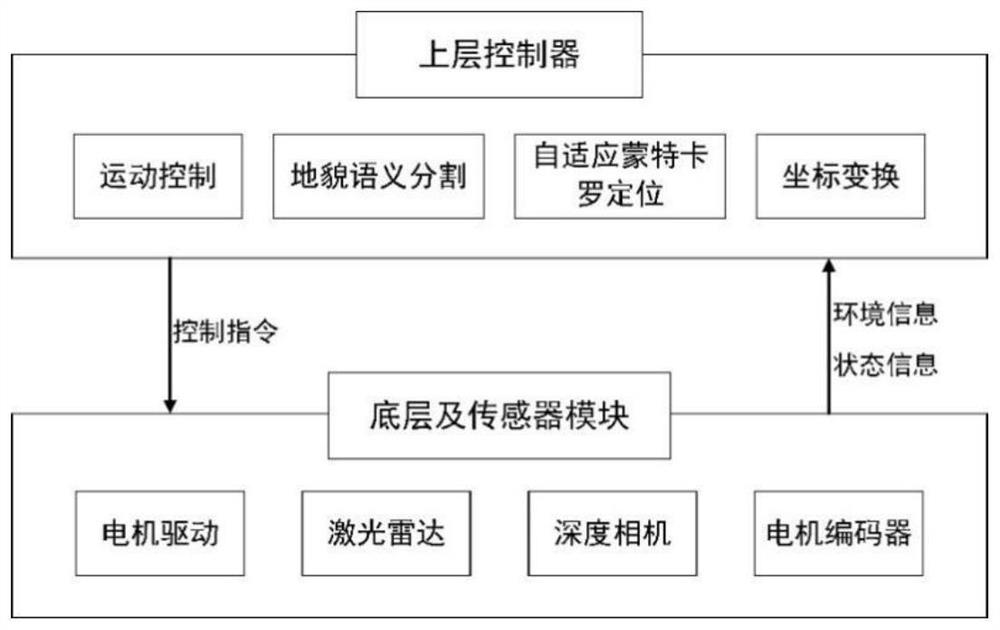
[0042] This implementation plan uses Scout Mini robot, Jetson AGX Xavier small workstation, RPLiDARA3 lidar and RealSense D435 depth camera to build an experimental platform, such as figure 1 shown. A method for constructing a landform map that is convenient for efficient navigation of an autonomous mobile robot, comprising the following specific implementation steps:
[0043] Step 1: Use depthwise separable convolution to build the encoding path of the landf...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More