

Exoskeleton type man-machine back frame system for astronaut micro-low gravity simulation
An exoskeleton and astronaut technology, applied in the field of exoskeleton man-machine back frame system, can solve the problems of limited simulation level, no compensation for gravity moment, and inability to simulate the weightlessness of astronauts, etc., to achieve the effect of improving the simulation level
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to make the above objects, features and advantages of the present invention more comprehensible, specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings.
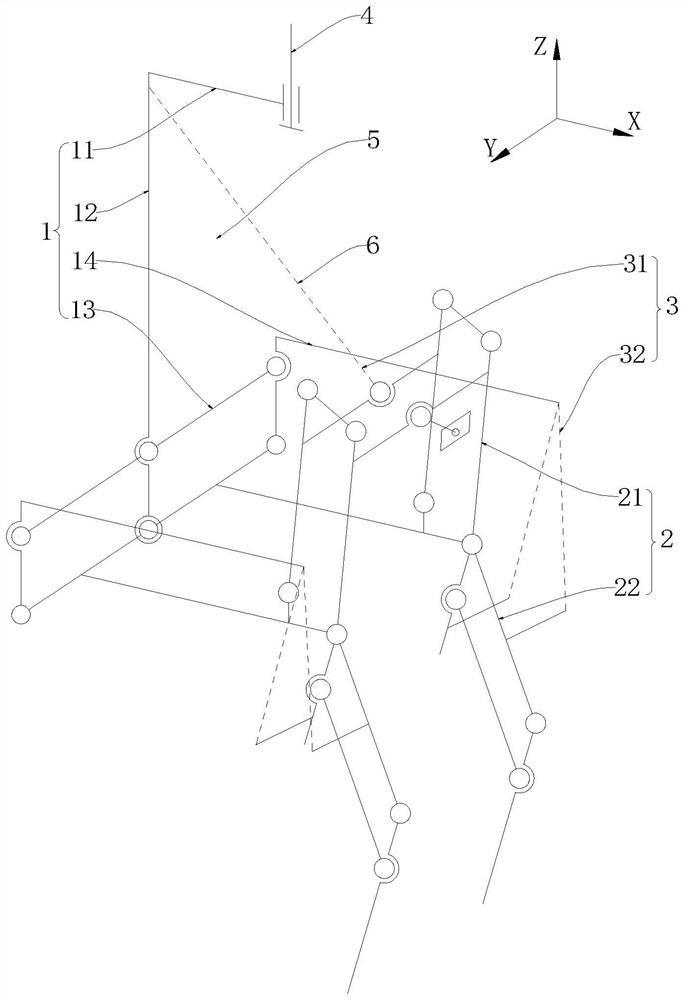
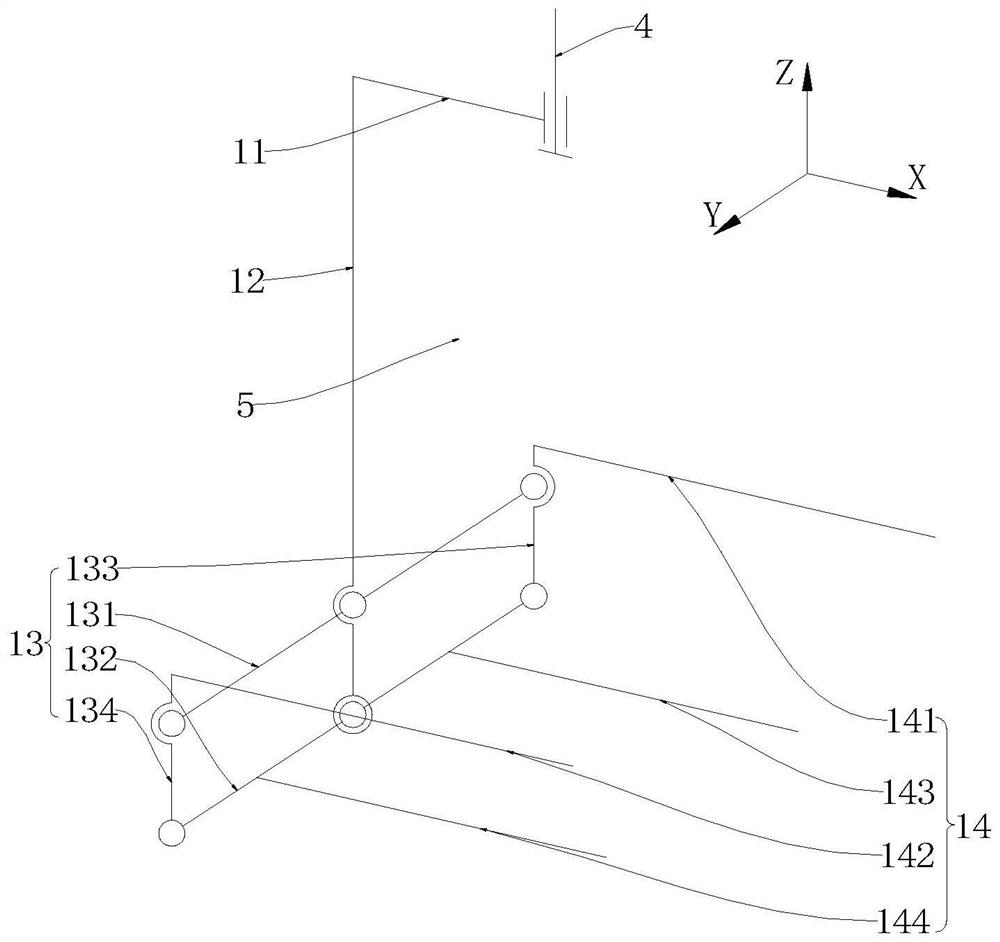
[0023] It should be noted that in the XYZ coordinate axes provided in this article, the positive direction of the X axis represents the front, the reverse direction of the X axis represents the rear, the positive direction of the Y axis represents the right, the reverse direction of the Y axis represents the left, and the reverse direction of the Z axis represents the left. The positive direction represents the upward direction, and the reverse direction of the Z axis represents the downward direction. At the same time, it should be noted that the terms "first" and "second" in the description and claims of the present invention and the above drawings are used to distinguish similar objects, and not necessarily used to describe a specific or...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More