

Data-driven dynamic internal model control technology
A data-driven and control technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of large amount of data and calculation, difficult system mechanism model, etc., to achieve small calculation and good control effects, easy-to-implement effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0064] In order to better illustrate the purpose and advantages of the present invention, the content of the invention will be further described in detail below in conjunction with the embodiments and corresponding drawings.
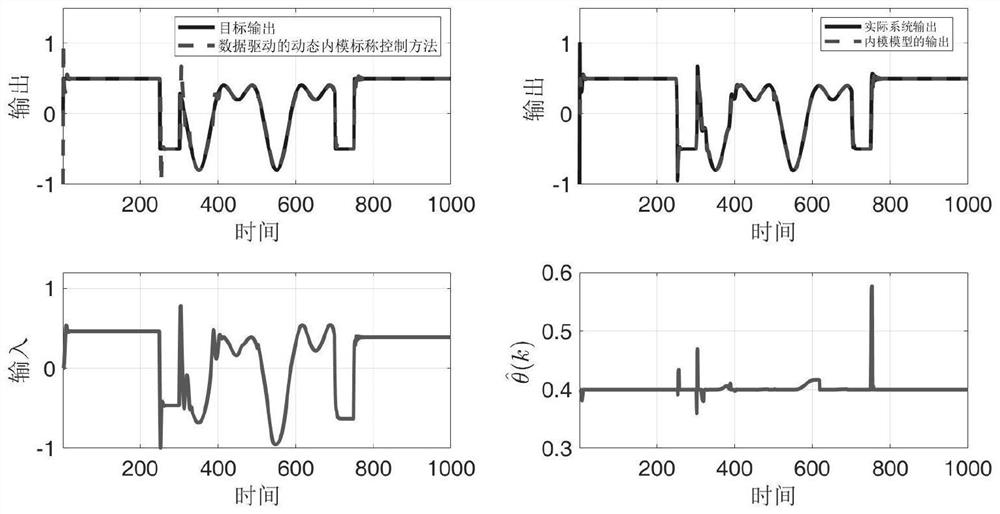
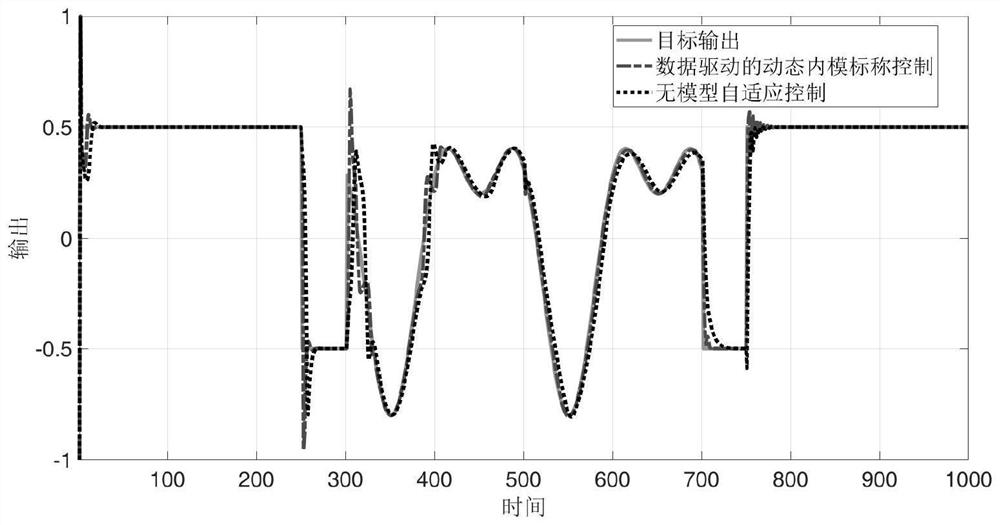
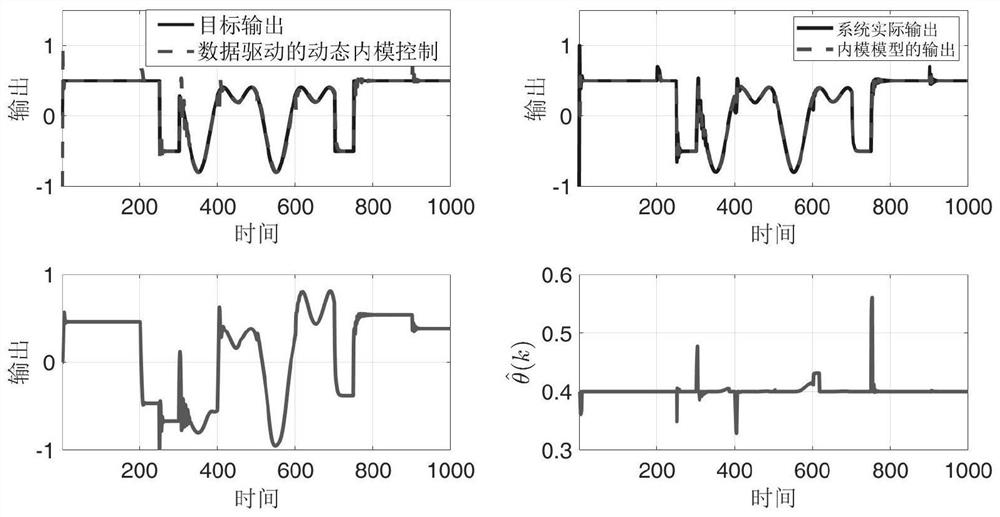
[0065] Consider a discrete-time nonlinear nonaffine system:
[0066] y(k+1)=f(y(k),...,y(k-n y ),u(k),…,u(k-n u )) (a1)
[0067] in,
[0068] y(k)∈R represents the output of the system at time k;
[0069] u(k)∈R represents the input of the system at time k;
[0070] no u with n y respectively represent the order of system input and output, which are two unknown positive integers;
[0071] represents an unknown nonlinear function;
[0072] The above discrete-time nonlinear non-affine system (a1) needs to meet the following assumptions:
[0073] Assumption 1: For any moment, the partial derivative of the nonlinear function f( ) with respect to u(k) exists and is continuous;
[0074] Assumption 2: The system (a1) satisfies the generalized Lipsch...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More