Control architecture for autonomously splicing distributed multi-habitat spherical unmanned system
A distributed and spherical technology, applied in the direction of unmanned aircraft, attitude control, control/adjustment system, etc., can solve the problems of multi-dwelling unmanned system with large functional limitations, and achieve the difficulty of simplified control and tracking accuracy Excellent, easy engineering effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0054] The present invention will be described in further detail below in conjunction with the accompanying drawings and embodiments.
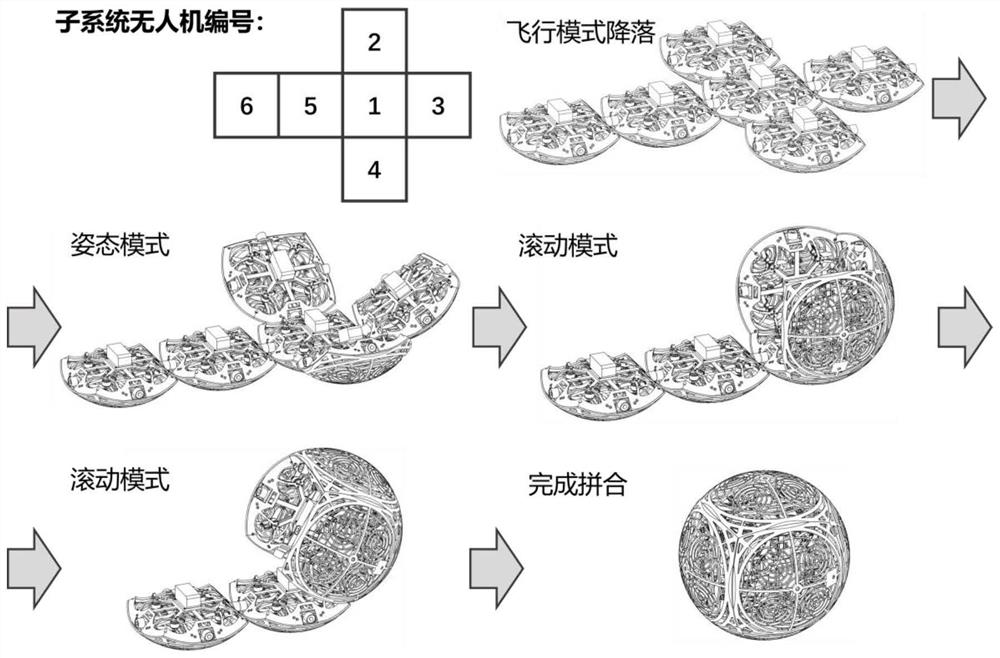
[0055] The invention proposes a control framework for the autonomous splicing of a distributed multi-dwelling spherical unmanned system. According to different stages of splicing, the controller can be divided into flight mode, attitude control mode and sphere rolling mode. Among them, the flight mode is mainly responsible for the multi-level formation flight and air docking operation of the subsystem UAV; the attitude control mode is mainly used for the stage of splicing into a hemisphere; the rolling mode is mainly used for the rolling control of the ground sphere mode and the hemisphere stitching The stage of synthesizing a complete sphere; the specific design steps are as follows:
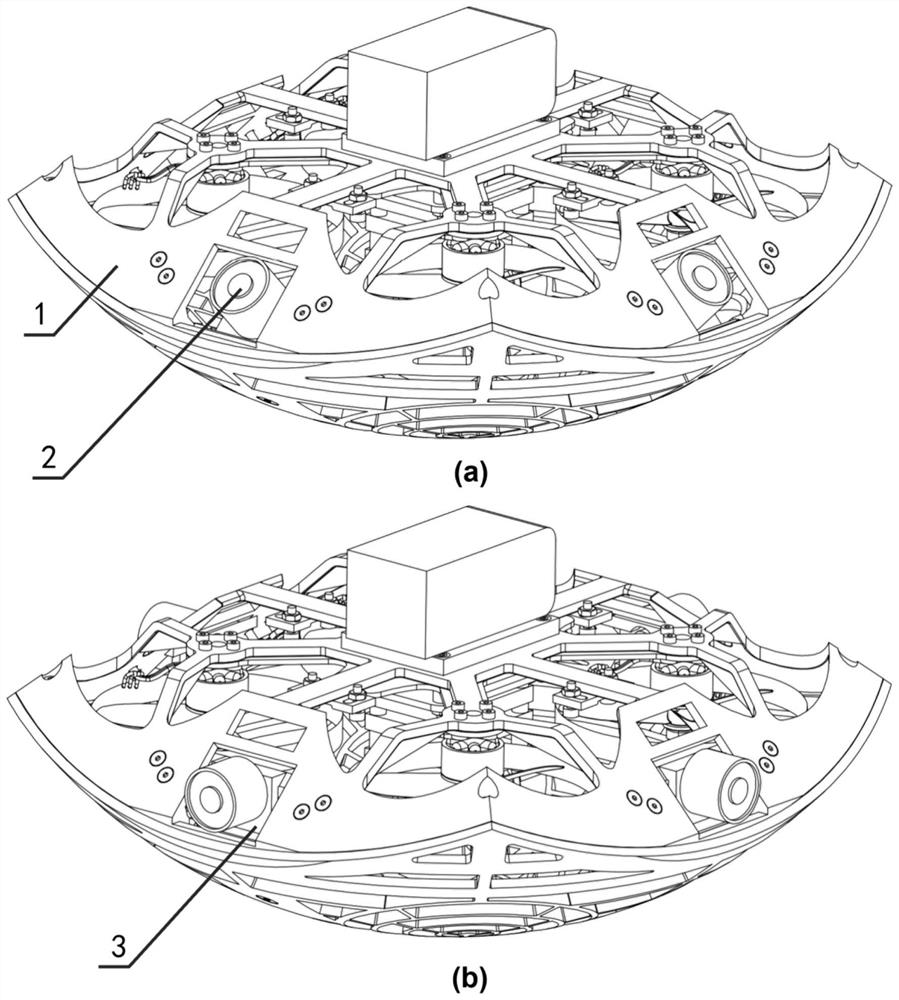
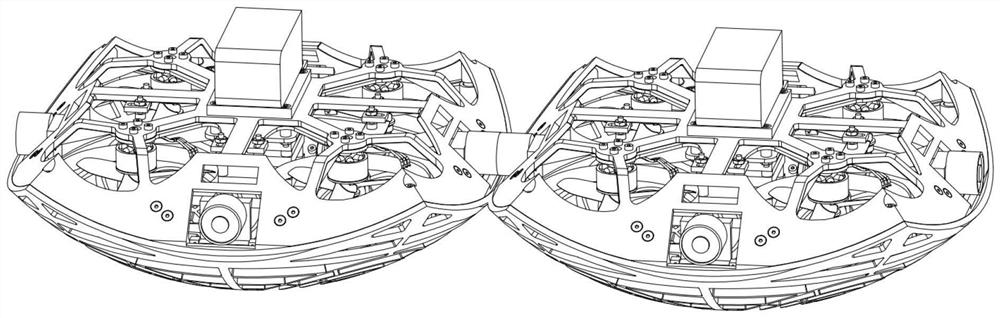
[0056] The first step is the design of the electromagnetic connection mechanism and splicing process between the rotor subsystems of the UAV. The UAV with a s...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com