

Unmanned aerial vehicle wind disturbance resistance control method and device, terminal and storage medium
A control method and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of low disturbance suppression efficiency and achieve the effect of solving low disturbance suppression efficiency and suppressing position deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0073] In order to make the object, technical solution and advantages of the present invention more clear and definite, the present invention will be further described in detail below with reference to the accompanying drawings and examples. It should be understood that the specific embodiments described here are only used to explain the present invention, not to limit the present invention.
[0074] exemplary method
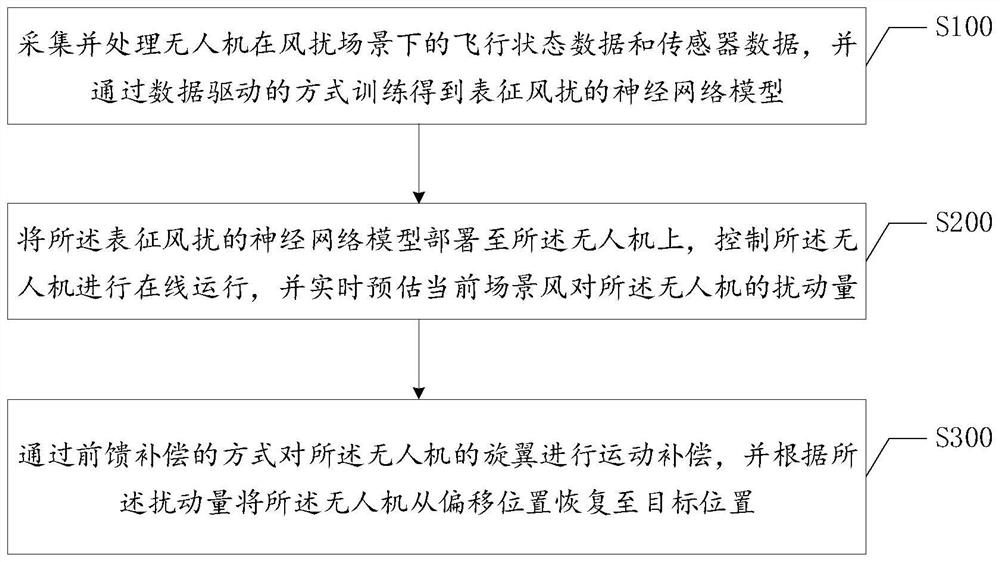
[0075] like figure 1 As shown, the embodiment of the present invention provides a UAV anti-wind disturbance control method, and the UAV anti-wind disturbance control method includes the following steps:
[0076] Step S100, collecting and processing the flight state data and sensor data of the UAV under the wind disturbance scene, and training a neural network model representing wind disturbance through data-driven training.
[0077] In this embodiment, the anti-wind disturbance control method of the UAV is applied to a terminal, and the terminal includes but i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More