

Article distribution method and device, robot and storage medium
A technology of robots and objects, applied in the field of robots, can solve problems such as reduced work efficiency, achieve the effects of improving work efficiency, reducing human operation and influence, and optimizing user experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
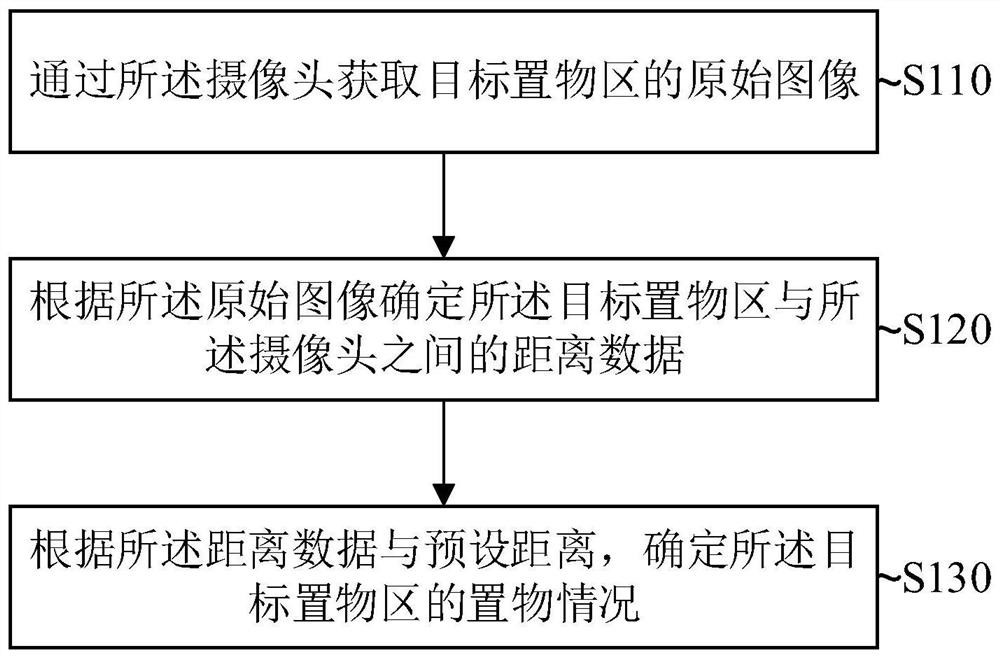
[0026] figure 1 It is a flow chart of an item delivery method provided in Embodiment 1 of the present application. The embodiment of the present application can be applied to identify the storage situation of the target storage area, and the method can be executed by an item distribution device, which can be implemented by software and / or hardware, and can be specifically configured above the storage area on each floor Correspondingly, the item distribution robot equipped with a camera can also be configured in the background server.
[0027] refer to figure 1 The item distribution method shown specifically includes the following steps:
[0028] S110. Obtain an original image of the target storage area through the camera.
[0029] Wherein, the target storage area may be a built-in storage area in the item delivery robot, such as a cabin compartment of a meal delivery robot, and the area where items can be placed on each compartment can be called a target storage area. Spec...
Embodiment 2
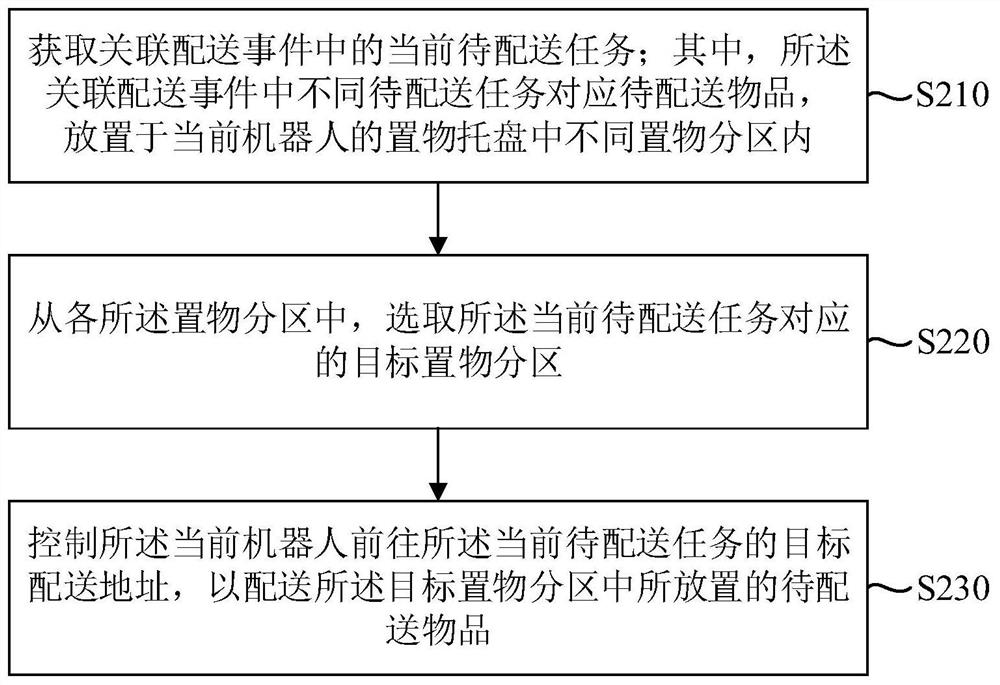
[0062] figure 2 It is a flowchart of an item delivery method provided in Embodiment 2 of the present application. The embodiment of the present application is applicable to the situation of distributing different items in the same original storage tray separately, and supplements the delivery operation in the work of the item delivery robot to improve the efficiency of item delivery.
[0063] refer to figure 2 The item distribution method shown specifically includes the following steps:
[0064] S210. Obtain the current task to be delivered in the associated delivery event; wherein, different tasks to be delivered in the associated delivery event correspond to items to be delivered, and are placed in different storage partitions in the original storage tray of the current robot.
[0065] Wherein, the associated delivery event is a collection of tasks to be delivered that the current robot needs to continuously execute, and the associated delivery event includes at least tw...
Embodiment 3
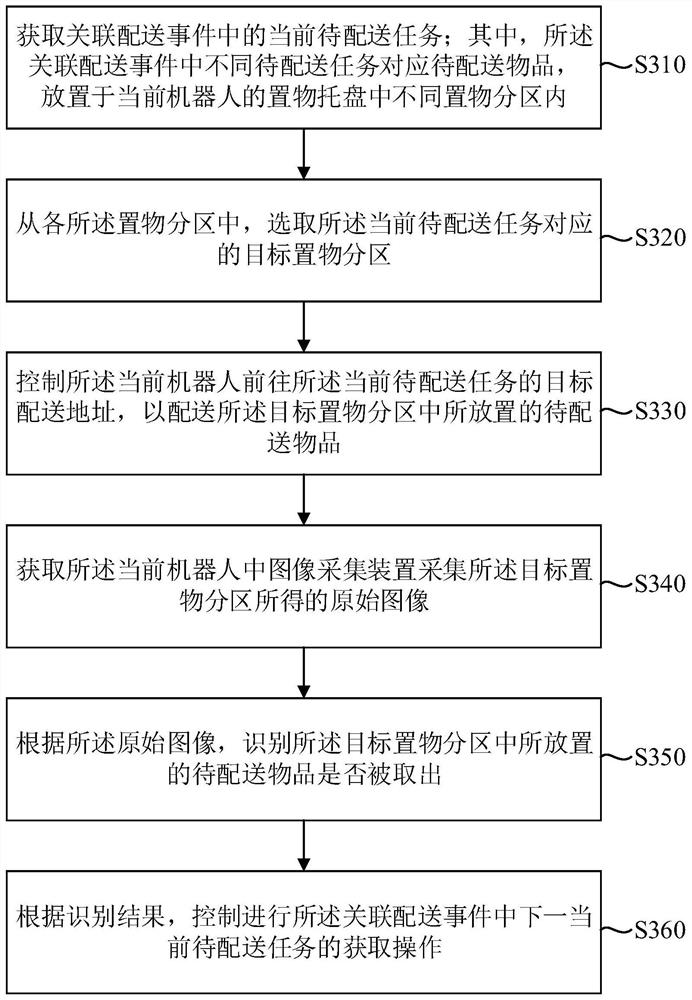
[0081] image 3 It is a flow chart of an item delivery method provided in Embodiment 3 of the present application. On the basis of the technical solutions of the foregoing embodiments, the embodiment of the present application supplements the operation of judging whether the item to be delivered is delivered correctly, so as to improve the accuracy of the item delivery process.
[0082] refer to image 3 An article distribution method shown specifically includes the following steps:
[0083] S310. Obtain the current task to be delivered in the associated delivery event; wherein, different tasks to be delivered in the associated delivery event correspond to items to be delivered, and are placed in different storage partitions in the original storage tray of the current robot.
[0084] S320. From each of the storage partitions, select a target storage partition corresponding to the current task to be delivered.
[0085] S330. Control the current robot to go to the target deli...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More