

Lane detection method and system based on connected region extraction and key point fitting
A technology of Unicom area and lane detection, applied in the field of traffic environment perception, can solve the problems of inability to perceive the traffic environment, and achieve the effect of ensuring perception and understanding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
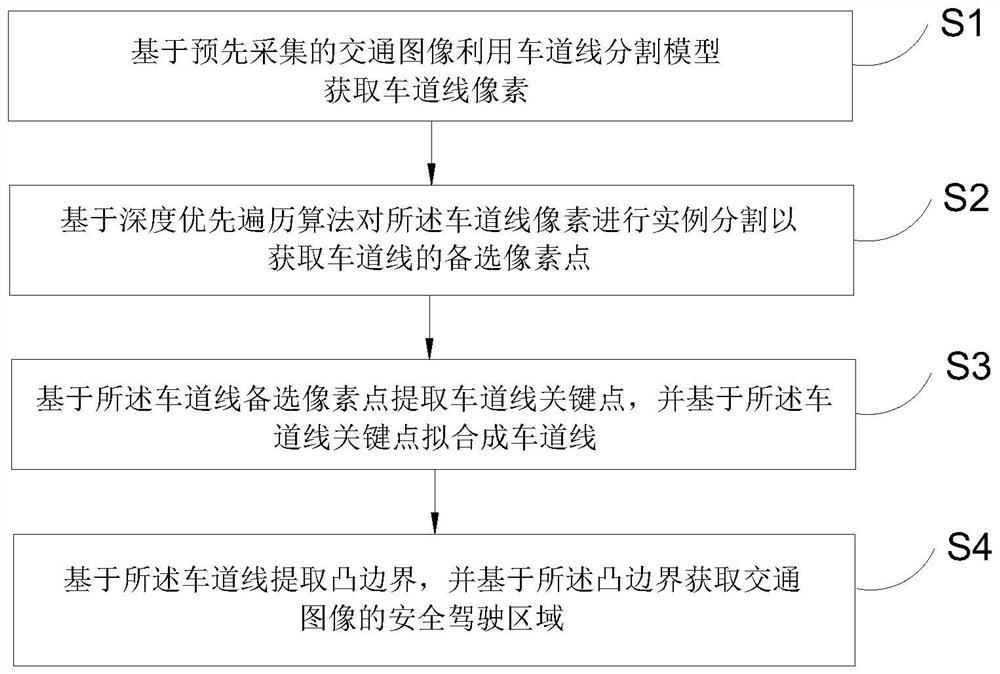
[0057] First, see Figure 1-2 , the present invention first proposes a lane detection method based on Unicom region extraction and key point fitting, the method includes:
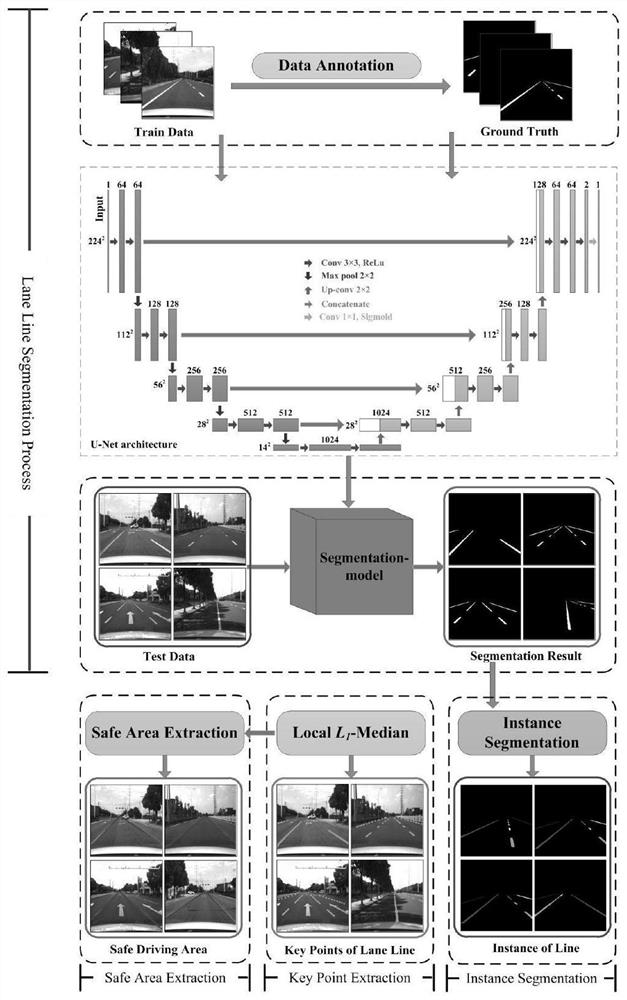
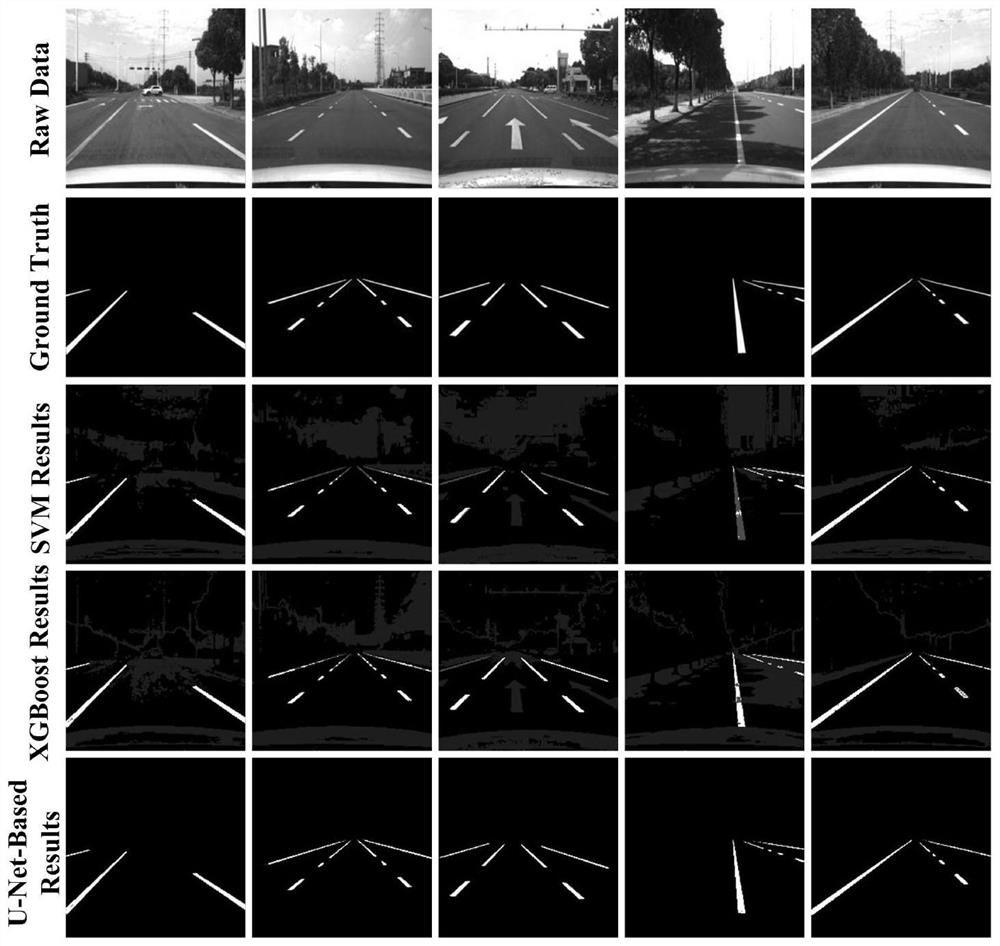
[0058] S1. Based on the pre-collected traffic image, the lane line segmentation model is used to obtain lane line pixels;
[0059] S2. Perform instance segmentation on the lane line pixels based on the depth-first traversal algorithm to obtain candidate pixel points of the lane line;
[0060] S3. Extract key points of the lane line based on the candidate pixel points of the lane line, and fit a lane line based on the key points of the lane line;
[0061] S4. Extract a convex boundary based on the lane line, and obtain a safe driving area of the traffic image based on the convex boundary.
[0062] In this embodiment, based on the lane detection method and system of Unicom area extraction and key point fitting, the collected traffic images are segmented using the lane line segmentation model to obtain lan...
Embodiment 2
[0107] In the second aspect, the present invention also provides a lane detection system based on Unicom region extraction and key point fitting, the system comprising:
[0108] A lane line pixel acquisition module, configured to acquire lane line pixels using a lane line segmentation model based on pre-collected traffic images;
[0109] The instance segmentation module is used to perform instance segmentation on the lane line pixels based on the depth-first traversal algorithm to obtain candidate pixel points of the lane line;
[0110] A lane line fitting module, configured to extract key points of the lane line based on the candidate pixel points of the lane line, and fit a lane line based on the key points of the lane line;
[0111] A safe driving area extraction module, configured to extract a convex boundary based on the lane line, and obtain a safe driving area of the traffic image based on the convex boundary.
[0112] Optionally, the instance segmentation module per...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More