

Multi-agent-based combat simulation system and method for unmanned and unmanned cooperative system
A combat simulation system and multi-agent technology, which is applied in the field of combat simulation systems of manned and unmanned cooperative systems, can solve the problems of difficult victory mechanism and organizational application mode research methods, partial macroscopic, and unverifiable victory mechanism.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
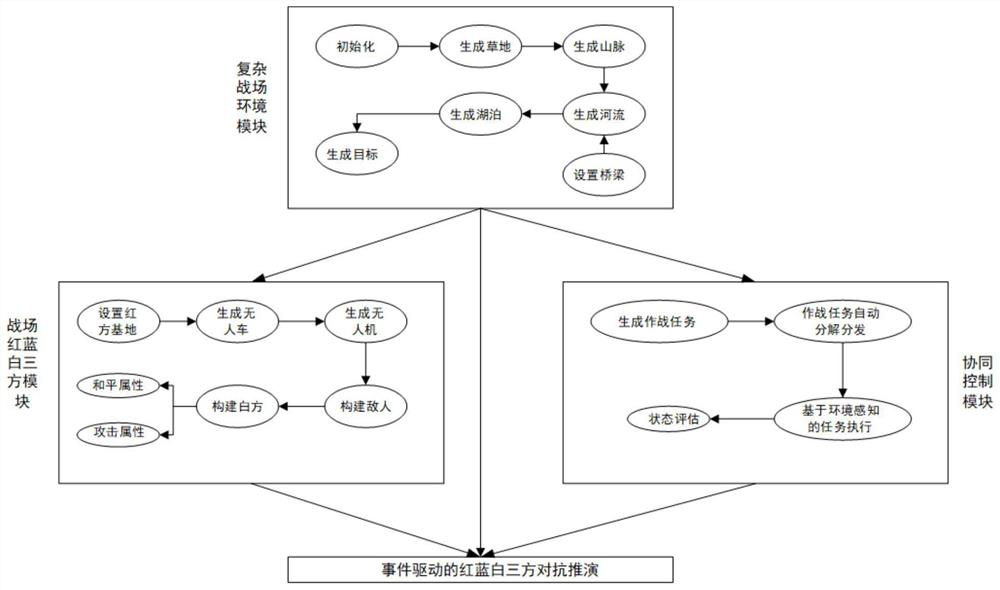
[0047] Example 1, as figure 1 As shown in the figure, Embodiment 1 of the present invention provides a multi-agent-based combat simulation system for an unmanned cooperative system, including a complex battlefield environment module, a battlefield red, blue and white three-way module, a collaborative control module, and a red, blue and white three-way confrontation and deduction module .
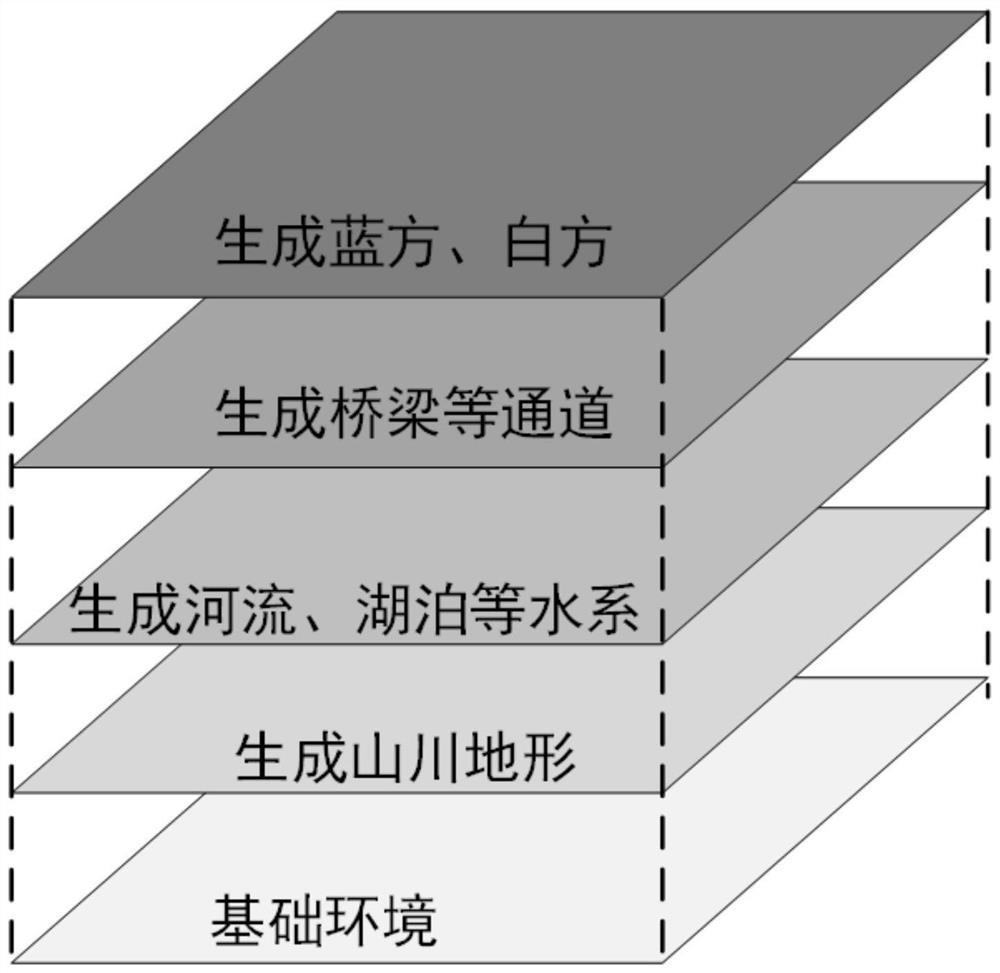
[0048] At the same time as figure 2 As shown, the complex battlefield environment module is a battlefield natural environment building module based on a stacked model, and the automatic generation of the battlefield environment can simulate a more realistic battlefield environment. The battlefield environment has the characteristics of diversification and interaction. The geographical environment is the main determinant of the battlefield environment, and the climatic environment will also have a greater impact on the battlefield environment. The battlefield environment is dynamically gen...
Embodiment 2
[0057] Embodiment 2, Embodiment 2 of the present invention provides a combat simulation method based on a multi-agent-based cooperative system with unmanned personnel, which specifically includes:
[0058] S1. The environment is initialized, and the red team's combat formation and target tasks are initialized at the same time.
[0059] S2. Complex environment construction. The constructed environmental elements include obstacles and natural environment, such as mountains, lakes, rivers and bridges, etc., and also includes physical constraint models, which are used to input the actual constraints of the physical world, such as collision detection, limit speed, steering angle limit, etc.
[0060] In this environment, the convoy simulates human behavior by planning topologically compliant paths using a weighted A* algorithm.
[0061] S3, red, blue and white three-party intelligent body construction, in which red represents our party, blue represents the enemy, white represents t...
Embodiment 3
[0073] In Embodiment 3, on the basis of Embodiments 1 and 2, the application scenario of the present invention is further explained by taking the example of the coordinated realization of the escort of combat materials by drones and unmanned vehicles in complex confrontation scenarios.
[0074] In complex confrontation scenarios, the coordinated realization of the escort of combat materials by UAVs and unmanned vehicles often requires solving the problem of autonomous execution of combat tasks based on scene cognition. This embodiment proposes an imaginary scene based on collaborative scene cognition of drones and unmanned vehicles, which may include obstacles and natural elements, such as mountains, lakes, rivers and bridges. Unmanned vehicles escort important Materials arrive at their destination. Drones are partially aware and managed in a distributed fashion. UAVs have limited resources and may face enemy attacks. UAVs have limited fuel resources and are gradually consume...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More