

Control method for carrying out knocking protection and inclination protection on lifting table without calculating Euler angle
A control method and technology for raising and lowering desks, applied in the field of raising and lowering desks, can solve the problems of slow response speed of raising and lowering desks, occupying a lot of code space, poor user experience, etc., to achieve cost control advantages, small amount of code, and time-consuming solution. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0035] The lifting table does not calculate the Euler angle for the control method of knock protection and tilt protection, and the specific steps of the method include:
[0036] Step 1. Use the accelerometer to collect the initial acceleration values of the X, Y, and Z axes of the lifting table, and judge the running state of the lifting table.
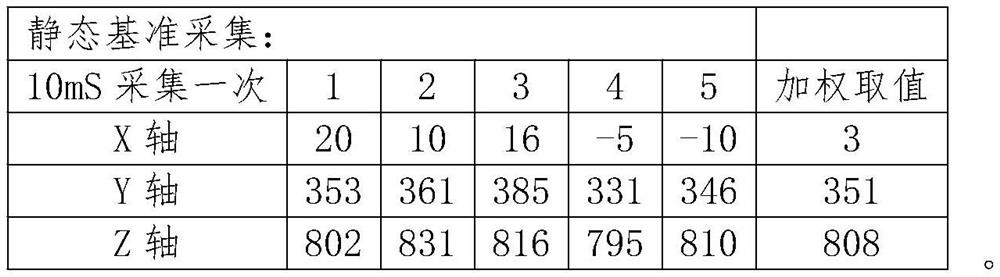
[0037] Step 2. When the lifting table is in a static state, the acceleration values of the X, Y, and Z axes are continuously collected for several times every 10mS, and weighted to the last value, and then the average value is obtained, and the obtained value is used as the initial state of the desktop. value, and save it to the storage module, specifically: the acceleration values of X, Y, and Z axes are continuously collected every 10mS, and the weighted 33% of the new sampling later is added to the previous value to generate a new value, which is continuously sampled multiple times, for example : X2'=(X1+X1+X2) / 3, the calcul...
Embodiment 2
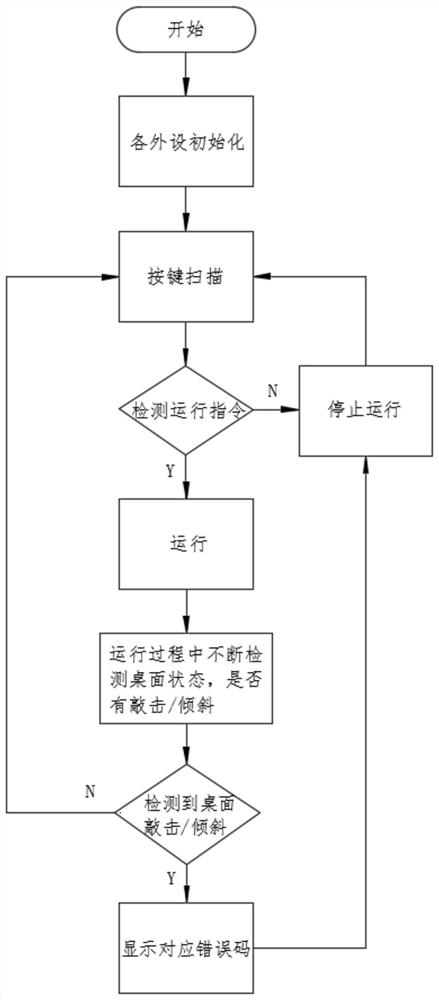
[0058] like figure 1 As shown in the figure, the control process in the operation of the lifting table is illustrated as an example. After the control system of the lifting table is turned on, each peripheral is initialized, and then the key scan is performed. When the operation command is detected, the detection system operation uses the accelerometer LIS3DH to read X, The acceleration values of the Y and Z axes are collected, and the initial acceleration values of the X, Y, and Z axes of the lifting table are collected to judge the running state of the lifting table. The accelerometer LIS3DH can also be replaced by an equivalent functional unit.
[0059] When the lifting table is in a stationary state, the acceleration values of the X, Y, and Z axes are continuously collected for many times, weighted to the last value, and then averaged. The obtained value is always used as the initial state value of the desktop and saved to In the storage module, the details are: the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More