

Penetrating hammer grabbing device
A technology for grabbing devices and through-holes, applied in the field of dynamic penetration testing, which can solve the problems of time-consuming and labor-intensive operations, complex overall structure of the penetrating hammer grabbing device, and low degree of automation, so as to achieve high portability and reduce the complexity of the overall structure , the effect of high degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
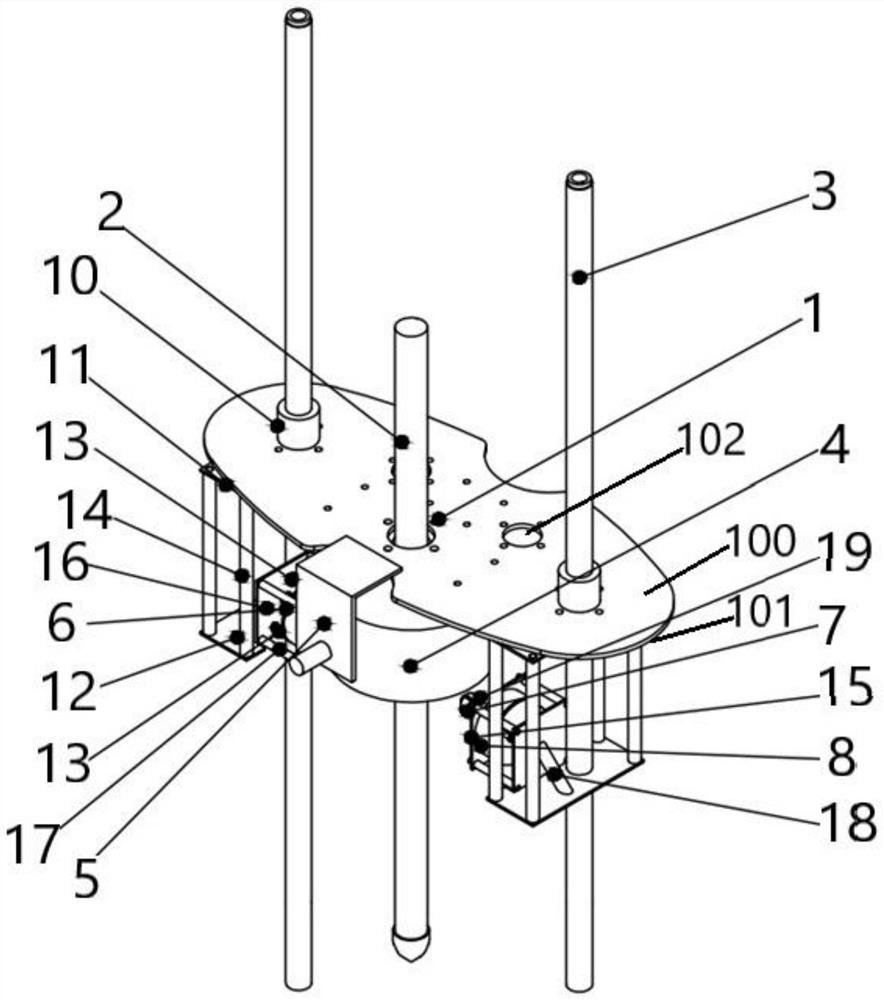
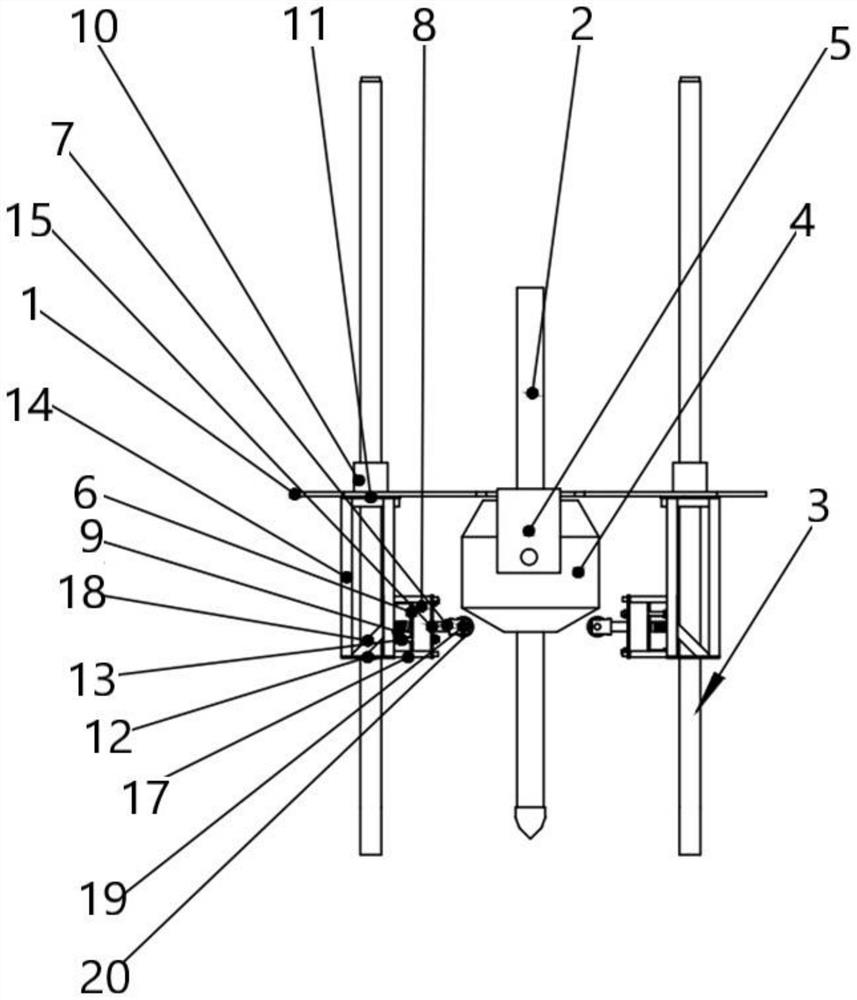
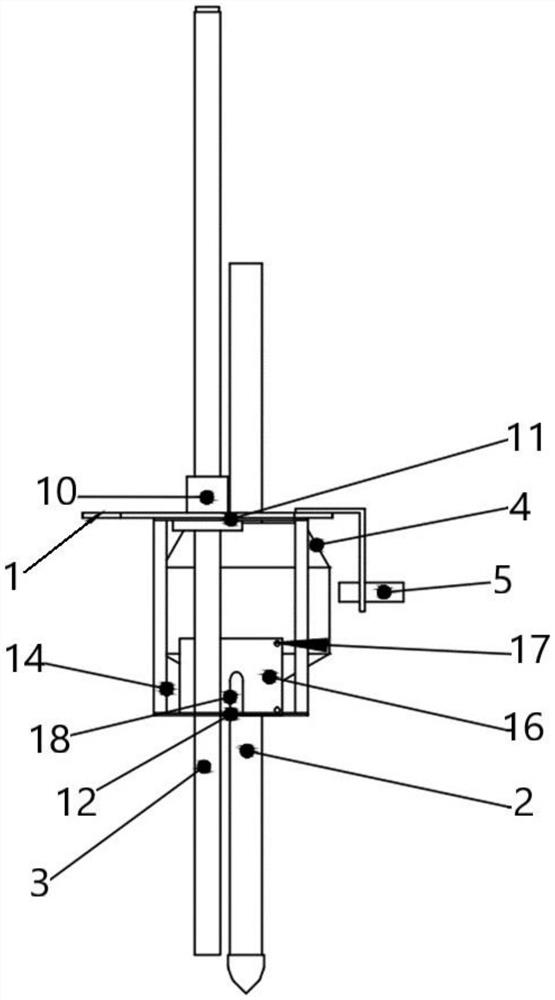
[0048] like Figure 1 to Figure 3 As shown, Embodiment 1 provides a penetrating hammer grabbing device, and the penetrating hammer grabbing device includes:
[0049] Moving platform 1, drill rod 2, guide rail 3, penetration hammer 4, metal sensor 5, sucked plate 6, latch rod 7, electromagnet 8 and spring 9;
[0050] Wherein, two guide rails 3 are symmetrically arranged on both sides of the moving platform 1, and the moving platform 1 is slidably connected with the guide rails 3;
[0051] The drill rod 2 is arranged in the middle of the moving platform 1, and is detachably connected with the penetration hammer 4;
[0052] The metal sensor 5 is fixedly connected to the moving platform 1 for real-time monitoring of the dynamic position of the penetration hammer 4;
[0053] The two sucked plates 6 are symmetrically arranged on both sides of the through hammer 4, and the sucked plates 6 are fixedly connected with the latch rod 7;
[0054] There are two latch rods 7 for lifting t...
Embodiment 2
[0076] The present application provides a terminal device, including a memory, a processor, and a computer program stored in the memory and running on the processor. When the processor executes the computer program, the control mechanism in Embodiment 1 is implemented. steps of a software program.
Embodiment 3
[0078] The present application provides a computer-readable storage medium, where the computer-readable storage medium stores a computer program, and when the computer program is executed by a processor, implements the steps of the software program in the control mechanism of Embodiment 1.
[0079] This application works as follows:
[0080] When the movable platform 1 grabs the penetrating hammer 4, the penetrating hammer 4 is divided into an upper end face and a lower end face, both of which are conical surfaces. At this time, the electromagnet 8 is not energized. 7 moves to the lower end face of the penetrating hammer. At the same time, the moving platform 1 stops moving downward under the control of the metal sensor 5, and uses a mobile power source, namely a battery, to continuously supply power to the electromagnet 8, and the electromagnet 8 absorbs the sucked plate 6. After the electromagnet 8 adsorbs the sucked plate 6 , the metal sensor 5 controls the moving platform ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More