Map positioning method and device of vehicle and electronic equipment
A positioning method and vehicle technology, applied in the direction of measuring devices, navigation, instruments, etc., can solve the problems of map and vehicle projection error increase, map positioning cannot adapt to intelligent driving, and path planning cannot be provided, etc., to reduce projection errors and improve The effect of real-time accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
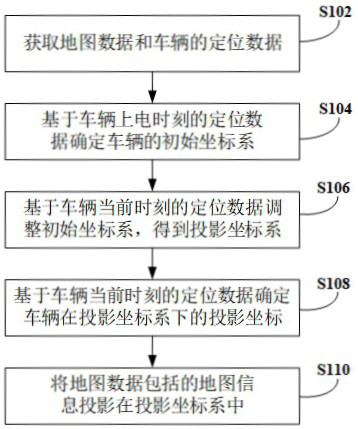
[0034] An embodiment of the present invention provides a map positioning method for a vehicle, see figure 1 The flow chart of a map positioning method of a vehicle shown, the map positioning method of the vehicle includes the following steps:
[0035] Step S102, acquiring map data and vehicle positioning data.
[0036] In this embodiment, map data and vehicle positioning data can be acquired. The acquisition frequency of vehicle positioning data is generally greater than the acquisition frequency of map data, for example, the acquisition frequency of vehicle positioning data may be 100 Hz, and the acquisition frequency of map data may be 1 Hz.
[0037] Among them, the map data can represent the environment of the surrounding area of the driving path of the vehicle, and the map data bureau can contain various terrains, the location and length, width and height information of the landforms. Positioning data of the vehicle Position information of the positioning data of the v...
Embodiment 2
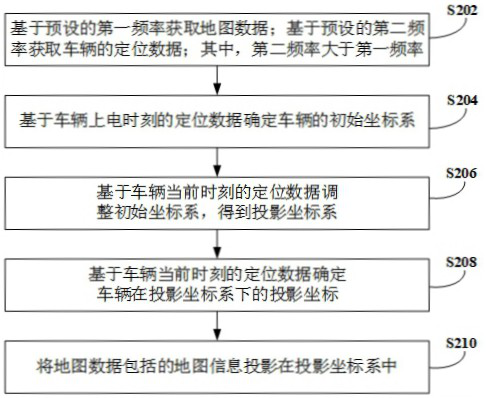
[0051] This embodiment provides another method for locating a vehicle on a map, which is implemented on the basis of the above-mentioned embodiment. figure 2 The flow chart of another vehicle map positioning method shown, the vehicle map positioning method includes the following steps:
[0052] Step S202: Acquire map data based on a preset first frequency; acquire vehicle positioning data based on a preset second frequency; wherein the second frequency is greater than the first frequency.
[0053] The embodiments of the present invention aim to solve the problem of projection errors in large-scale and long-distance map positioning, and provide an accurate two-dimensional plane map positioning information. The embodiment of the present invention can be adapted to a large-scale and long-distance map positioning projection scheme, and of course, can also be adapted to a small-scale map positioning projection scheme. Among them, the acquisition frequency of vehicle positioning d...
Embodiment 3
[0072] Corresponding to the above method embodiments, an embodiment of the present invention provides a map positioning device for a vehicle, see Figure 5 Shown is a schematic structural diagram of a map positioning device for a vehicle, the map positioning device for the vehicle includes:
[0073] A data acquisition module 51 is used to acquire map data and vehicle positioning data;
[0074] The initial coordinate system determination module 52 is used to determine the initial coordinate system of the vehicle based on the positioning data at the time when the vehicle is powered on;
[0075] The projection coordinate system determination module 53 is used to adjust the initial coordinate system based on the positioning data of the vehicle at the current moment to obtain the projection coordinate system;
[0076] The projection coordinate determination module 54 is used for determining the projection coordinates of the vehicle in the projection coordinate system based on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com