

Helicopter control load simulation system and method
A helicopter and load technology, applied in the field of flight simulation, can solve problems such as overloading of data processing ports
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0063] refer to figure 1 , the present invention provides a first embodiment of a helicopter manipulation load simulation system, figure 1 It is a structural diagram of the first embodiment of a helicopter manipulation load simulation system of the present invention.
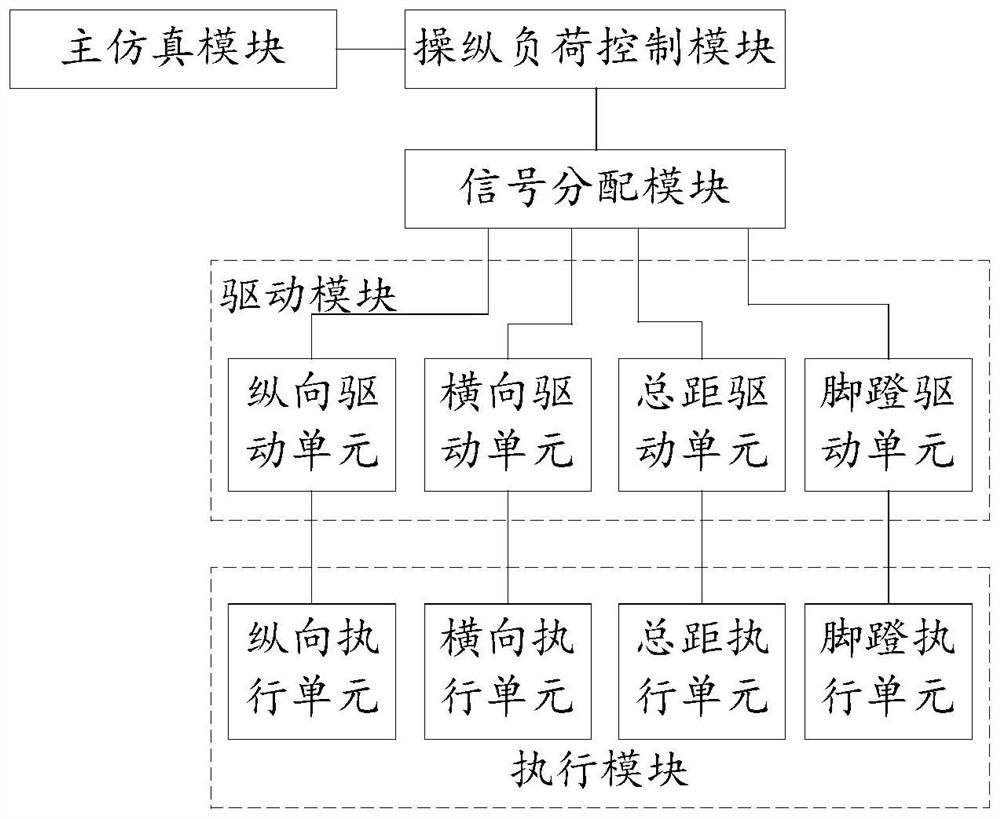
[0064] This embodiment provides a helicopter manipulation load simulation system, the system includes a main simulation module, a manipulation load control module, a signal distribution module, a drive module and an execution module;
[0065] The main simulation module is connected with the manipulation load control module, and is used for providing model force to the manipulation load control module;
[0066] The manipulation load control module is connected with the signal distribution module for generating an initial control signal according to the model force and the received loading force and angle values, and sending the initial control signal to the signal distribution module;
[0067] The signal distri...
Embodiment 2
[0075] refer to figure 1 , based on the above-mentioned first embodiment, the drive module includes a longitudinal drive unit, a lateral drive unit, a collective drive unit and a pedal drive unit;
[0076] The longitudinal drive unit is connected with the signal distribution module, and is used for generating longitudinal control instructions according to the target control signal, and sending the longitudinal control instructions to the execution module;
[0077] The lateral drive unit is connected with the signal distribution module, and is used for generating lateral control instructions according to the target control signal, and sending the lateral control instructions to the execution module;
[0078] The collective pitch drive unit is connected with the signal distribution module, and is used for generating collective pitch control instructions according to the target control signal, and sending the collective pitch control instructions to the execution module;
[0079...
Embodiment 3
[0085] refer to figure 1 , based on the second embodiment above, the execution module includes a longitudinal execution unit, a lateral execution unit, a collective pitch execution unit and a pedal execution unit;
[0086] The longitudinal execution unit is connected with the longitudinal drive unit, and is used to control the longitudinal movement of the simulation platform in the horizontal direction according to the longitudinal control instruction;
[0087] The lateral execution unit is connected with the lateral drive unit, and is used to control the lateral movement of the simulation platform in the horizontal direction according to the lateral control instruction;
[0088] The collective pitch execution unit is connected with the collective pitch drive unit, and is used to control the simulation platform to move in the direction perpendicular to the horizontal direction according to the collective pitch control instruction;
[0089] The pedal execution unit is connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More