

Standing pose adjusting method and system for foot type inspection robot
A patrol robot and posture adjustment technology, which is applied to motor vehicles, two-dimensional position/channel control, transportation and packaging, etc., can solve the problems of inaccurate stop position, fluctuation of center of mass height, and low positioning accuracy of sensors, and achieve Precise adjustment, the effect of improving position and angle accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] like figure 1 As shown, Embodiment 1 of the present disclosure provides a method for adjusting the standing posture of a foot-type inspection robot, including the following steps:
[0040] Obtain the posture information and geometric information of the foot-type inspection robot after standing steadily;
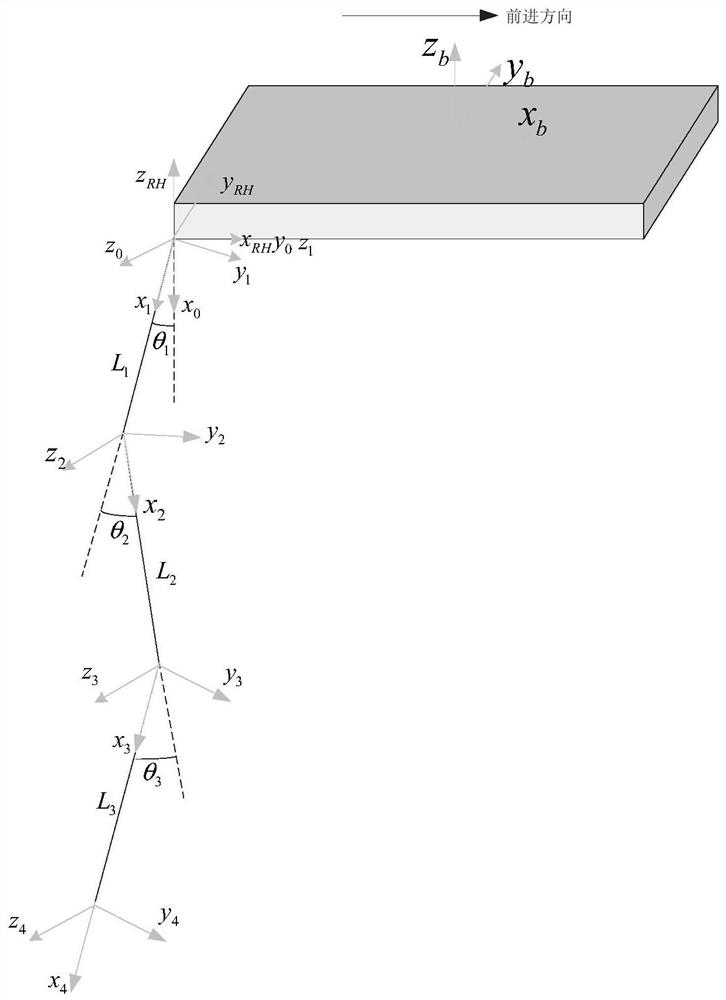
[0041] According to the obtained attitude information and geometric information, the initial coordinates of the foot end in the shoulder joint coordinate system are obtained;
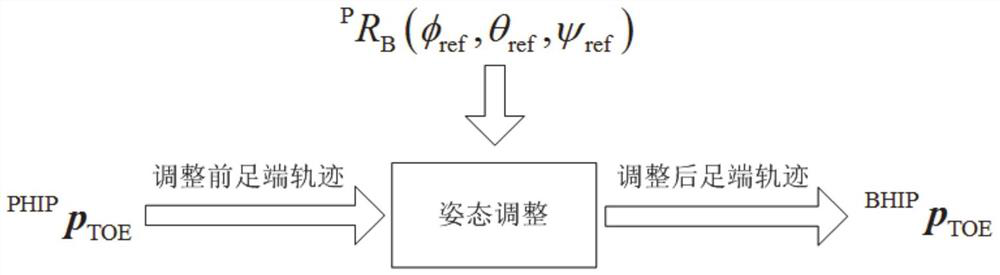
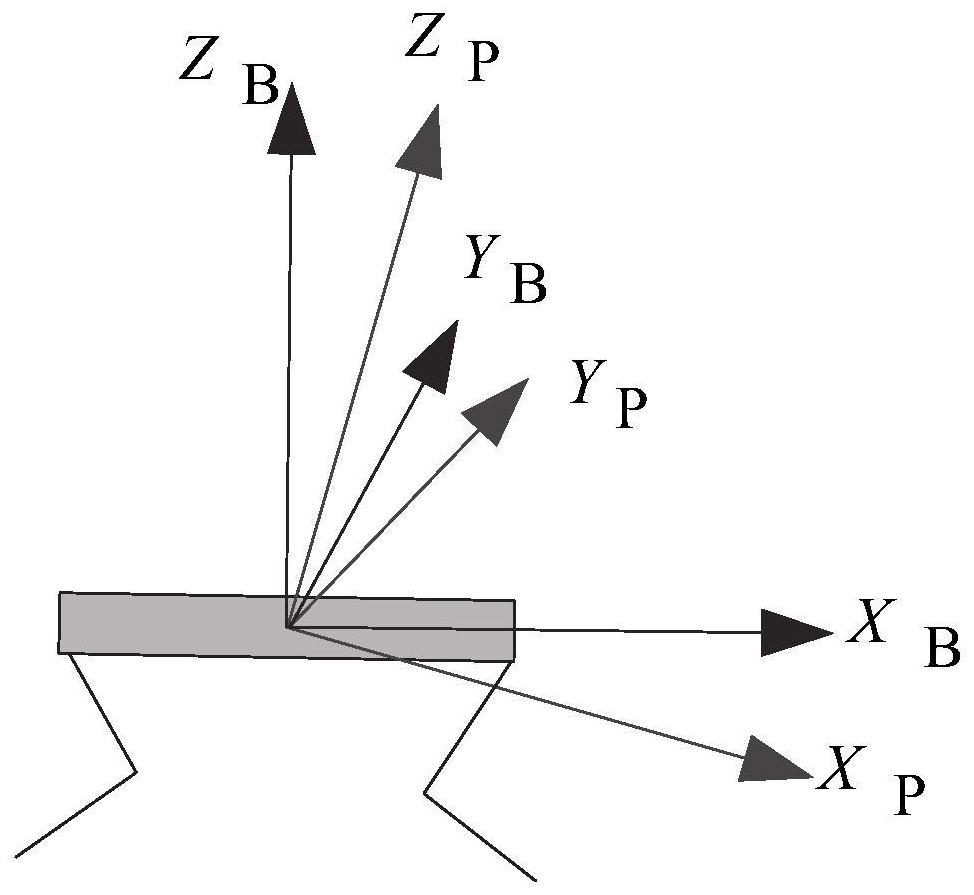
[0042] Combined with the initial coordinates, the adjustment amount of the trunk posture and the distance between the left and right feet, the new coordinates of the foot end in the shoulder joint coordinate system are obtained, and the pose adjustment is performed according to the new coordinates.
[0043] Specifically, it includes the following:
[0044] The inspection step of the footed robot is to traverse the preset inspection points one by one. Whenever it reaches the vicinity of the tar...
Embodiment 2
[0068] Embodiment 2 of the present disclosure provides a standing posture adjustment system for a foot-type inspection robot, including:
[0069] The data acquisition module is configured to: acquire the posture information and geometric information of the foot-type inspection robot after standing steadily;
[0070] The initial coordinate obtaining module is configured to: obtain the initial coordinates of the foot end in the shoulder joint coordinate system according to the obtained attitude information and geometric information;
[0071] The pose adjustment module is configured to: combine the initial coordinates, the adjustment amount of the trunk pose and the distance between the left and right feet to obtain new coordinates of the foot end in the shoulder joint coordinate system, and adjust the pose according to the new coordinates.
[0072] The working method of the system is the same as the method for adjusting the standing posture of the foot-type inspection robot prov...
Embodiment 3
[0074] Embodiment 3 of the present disclosure provides a medium on which a program is stored, and when the program is executed by a processor, implements the steps in the method for adjusting the standing posture of a foot-type inspection robot according to Embodiment 1 of the present disclosure. The steps are:
[0075] Obtain the posture information and geometric information of the foot-type inspection robot after standing steadily;
[0076] According to the obtained attitude information and geometric information, the initial coordinates of the foot end in the shoulder joint coordinate system are obtained;
[0077] Combined with the initial coordinates, the adjustment amount of the trunk posture and the distance between the left and right feet, the new coordinates of the foot end in the shoulder joint coordinate system are obtained, and the pose adjustment is performed according to the new coordinates.
[0078] The detailed steps are the same as the method for adjusting the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More