

Underwater positioning method of underwater sampling robot based on sonar image processing
A sonar image and underwater positioning technology, which is applied in image data processing, image analysis, instruments, etc., can solve the problems of uncontrollable error, high randomness, and high cost, and achieve precise positioning and tracking, simple calculation process, and fast processing speed. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] In order to make the objectives, technical solutions and advantages of the present invention clearer, the present invention will be described in further detail below with reference to the accompanying drawings and preferred embodiments. It is to be understood, however, that many of the details set forth in the specification are merely provided to provide the reader with a thorough understanding of one or more aspects of the invention, and that aspects of the invention may be practiced without these specific details.
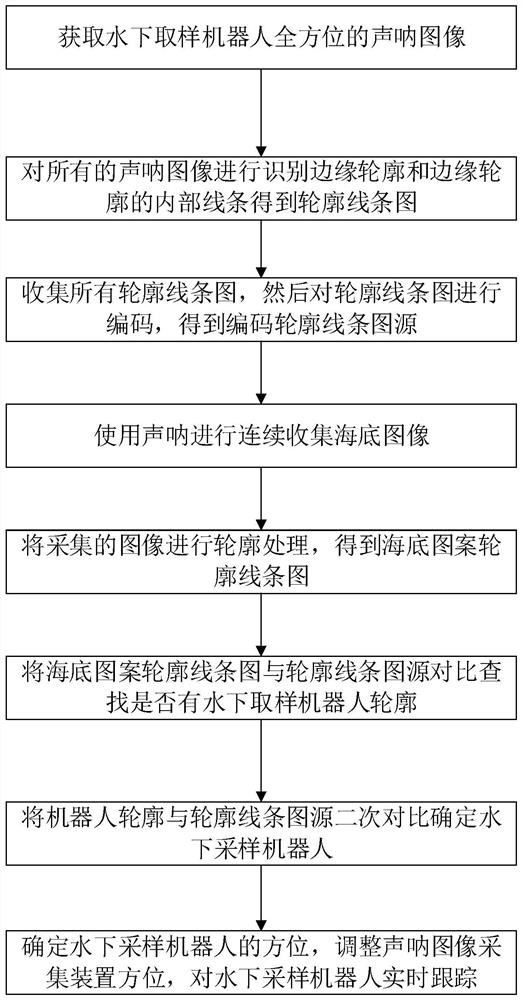
[0029] like figure 1 As shown, an underwater positioning method of an underwater sampling robot according to sonar image processing, the method comprises the following steps:
[0030] Step 1: Obtain the omnidirectional sonar image of the underwater sampling robot. Put the underwater sampling robot into the deep sea, and then determine the precise position of the underwater sampling robot through manual positioning. Among them, select the flat sea area on ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More