Underwater robot control method and device, computer equipment and storage medium
A technology of underwater robots and computer equipment, applied in the field of robotics, can solve the problem that underwater robots cannot track target trajectories, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
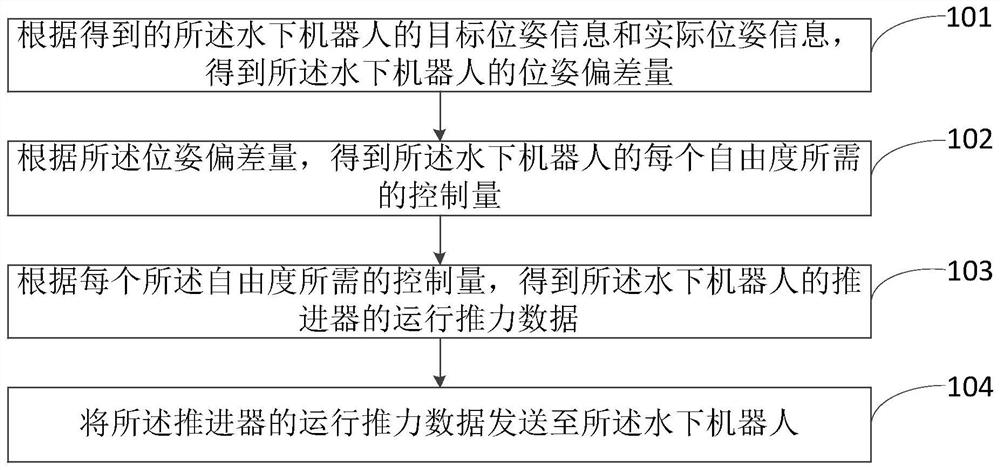
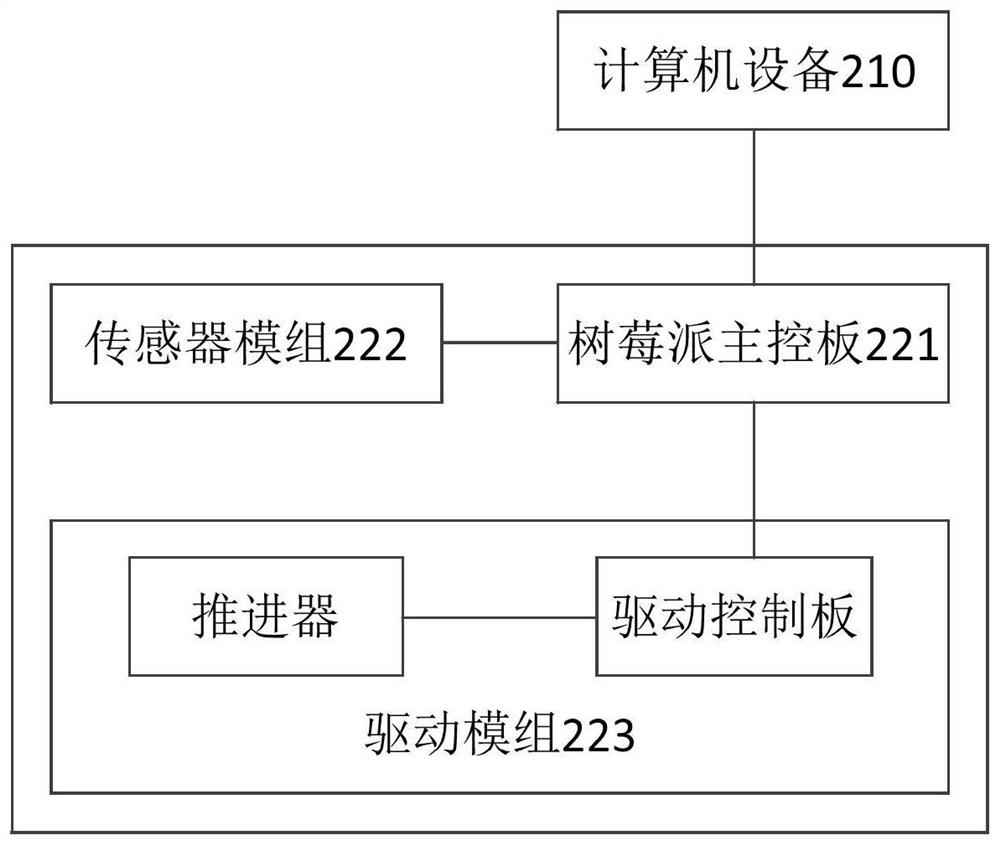
[0049] see figure 1 , figure 1 A flowchart of the first method for controlling an underwater robot provided by an embodiment of the present invention is shown. figure 1 The medium underwater robot control method is applied to computer equipment, and the computer equipment is connected with an underwater robot including a Raspberry Pi main control board. In this embodiment, the underwater robot chooses the Raspberry Pi 4B main control board to replace the existing Pixhawk flight control board, which effectively improves the computing performance of the underwater robot. Hardware basis for automatic control. The Raspberry Pi main control board is used to process the acquired data and upload the data to the computer device. The computer equipment is used to calculate the data transmitted by the underwater robot, and send control signals to the underwater robot to realize the automatic control of the underwater robot, so that the robot moves along the target trajectory. In add...
Embodiment 2
[0093] see Figure 4 , Figure 4 A schematic structural diagram of an underwater robot control device provided by an embodiment of the present invention is shown. Figure 4 The underwater robot control device 400 in the above is applied to computer equipment, and the computer device is connected with an underwater robot including a Raspberry Pi main control board, and the underwater robot control device 400 includes:
[0094] The deviation module 410 is used for obtaining the position deviation of the underwater robot according to the obtained target pose information and actual pose information of the underwater robot;
[0095] A control quantity module 420, configured to obtain the required control quantity for each degree of freedom of the underwater robot according to the position and attitude deviation;
[0096] The operating thrust data module 430 is used to obtain the operating thrust data of the propeller of the underwater robot according to the control amount require...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com