Unmanned cluster formation maneuvering control method based on sparse sampling and information interaction
A sparse sampling, information exchange technology, applied in three-dimensional position/channel control, advanced technology, climate sustainability, etc., can solve the problems of insufficient individual power supply energy, frequent communication and sampling frequency, limited system communication bandwidth, etc., to avoid The effect of continuous communication, saving power and energy, and saving communication bandwidth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Below in conjunction with the accompanying drawings, the present invention is further described by means of embodiments, but the scope of the present invention is not limited in any way.
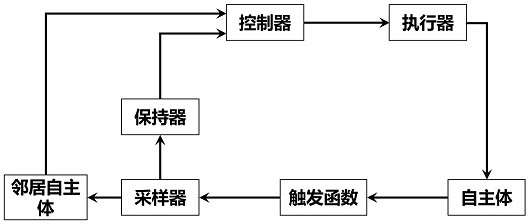
[0031] The invention provides an unmanned swarm affine formation maneuver control method based on sparse sampling and information interaction, figure 1 The function process of the sparse sampling information interaction method of the group system proposed by the present invention is introduced. First, design their own trigger functions for the main body in the formation. When the trigger function conditions are satisfied, the main body is sampled by the sampler in the system, and the sampled information is held by the index holder and released to the controller for processing. At the same time, the sampler in the system will broadcast the sampled information to its neighbors, and the neighbors will also update their own control algorithms after receiving the broadcast information.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com