

Lightweight folding intelligent mechanical arm
An intelligent machine, folding technology, applied in the field of robotic arms, can solve the problems of unstable operation, heavy picking or sorting execution parts, and occupying a large space, so as to reduce the space occupation rate, achieve light weight, Achieve the effect of small space storage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
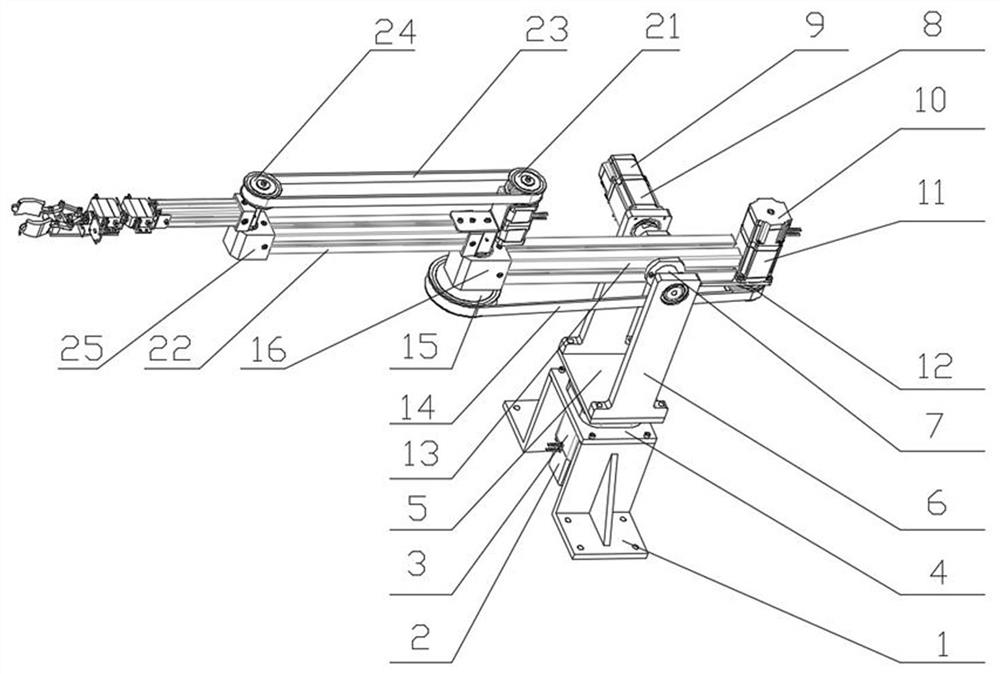
[0020] The specific embodiments of the present invention will be described in detail below with reference to the accompanying drawings. refer to Figure 1-7 As shown, a lightweight foldable intelligent robotic arm includes a rotating mechanism, a folding and unfolding mechanism and a grasping mechanism.
[0021] like figure 1 As shown, the rotating mechanism includes a base 1 and a first motor 3. The first motor is fixedly connected to the base through a mounting plate 4, and a rotating plate 5 is mounted on the output shaft of the first motor. The first motor can drive the rotating plate to rotate horizontally.
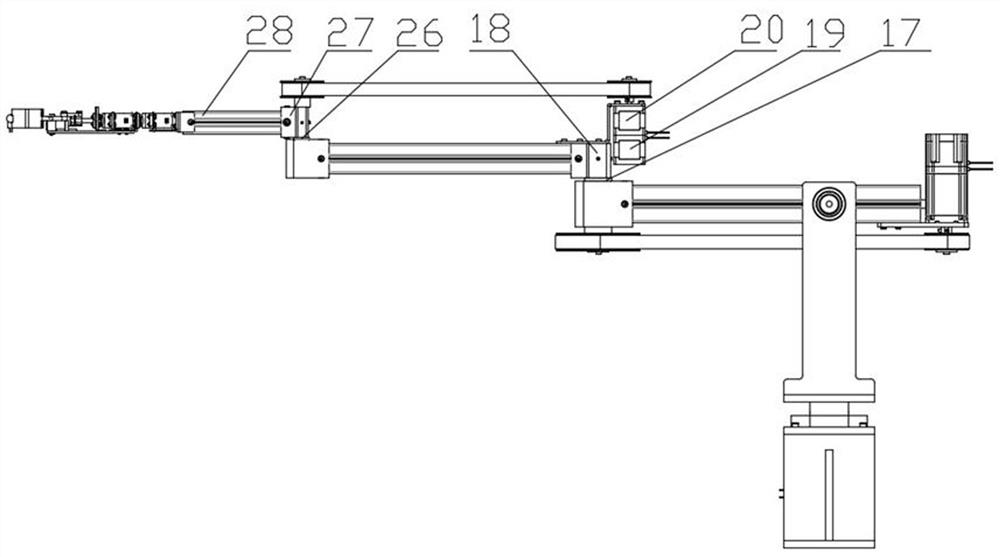
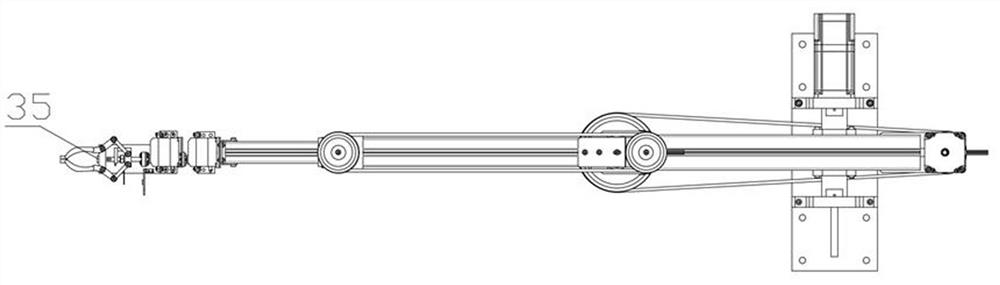
[0022] like Figure 1-2 As shown, the folding and unfolding mechanism includes a supporting plate 6, a large arm 13, a small arm 22 and an end arm 28. The supporting plate 6 is arranged on the rotating flat plate 5, and a second motor 8 is provided on one side of the top of the supporting plate. The arm 13 is arranged on the output shaft of the second motor so th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More