High-stability inspection robot for conveyor
An inspection robot, high-stability technology, applied in the field of inspection robots to achieve the effects of easy maintenance, low cost and low precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
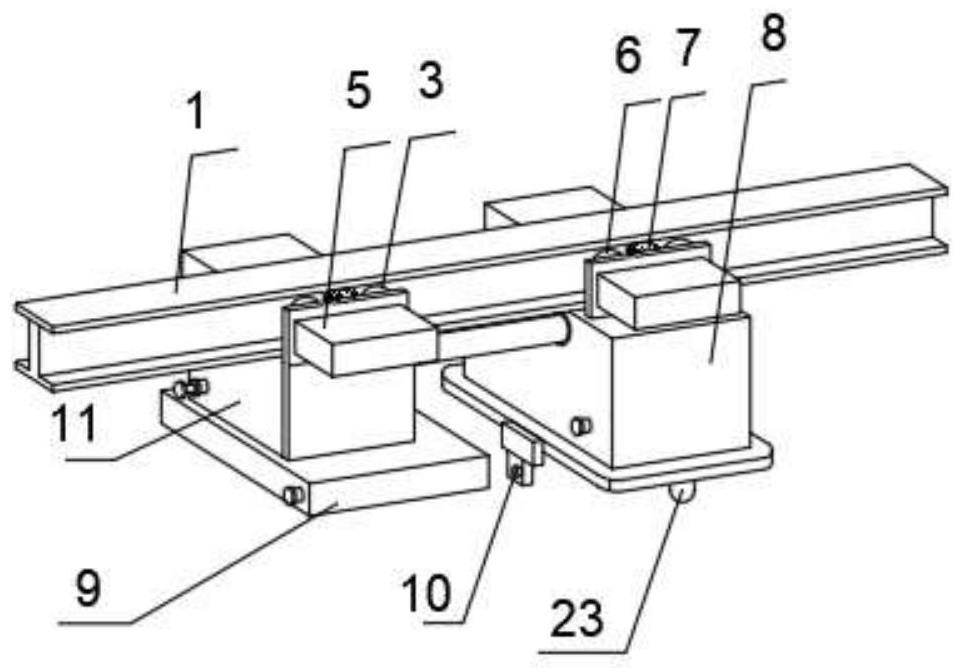
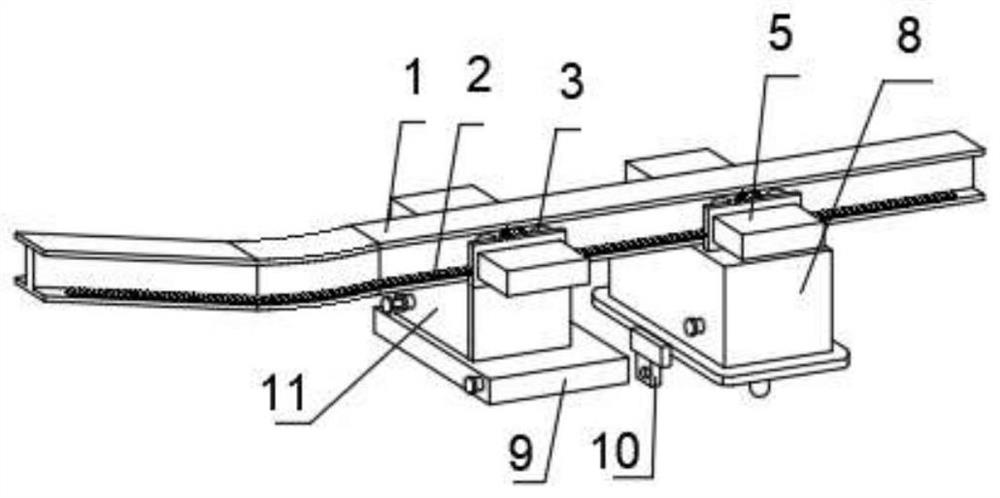
[0027] like Figure 1-4 As shown, the embodiment of the present invention provides a high-stability inspection robot for a conveyor, including a track 1, a robot body 13 and a charging station docking adjustment mechanism 12. Rollers 3 are connected on both sides of the inner side of the track 1. The inside of the explosion-proof driver 5 is provided with a driving member, and the driving member drives the roller 3 to roll inside the track 1 to realize the moving operation. One side of the roller 3 is provided with a driven wheel 6, and the driven wheel 6 is used to assist the rolling, One end of the roller 3 and the driven wheel 6 is provided with an explosion-proof driver 5, one side of the explosion-proof driver 5 is fixedly connected with a partition, and the bottom end of one end of the partition is fixedly connected with a power supply box 8, through which the interior is carried out. Power supply, the robot body 13 is fixedly connected in the inner part of the power sup...
Embodiment 2
[0031] When the generator 14 of the robot body 13 gradually approaches the variable frequency motor 22 , the variable frequency motor 22 rotates slowly, and the drum-shaped internal gear 17 on the rotating shaft of the generator 14 of the robot body 13 meshes with the drum-shaped external gear 18 on the output shaft of the variable frequency motor 22 Butt, when the drum-shaped inner gear 17 and the drum-shaped outer gear 18 mesh with the inner teeth and the outer teeth, the robot body 13 continues to drive slowly, and the spring buffer mechanism 19 at the rear end of the drum-shaped outer gear 18 can make the drum-shaped outer gear 18 retreat a certain amount At this time, due to the slow rotation of the rotating shaft of the variable frequency motor 22, the meshing internal teeth and external teeth can slide and mesh together, thereby ensuring that the generator 14 of the robot body 13 and the variable frequency motor 22 of the charging station are automatically and successfull...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More