

Robot control method and device
A control method and robot technology, which is applied in the field of robot positioning, can solve problems such as unproposed solutions, low robot control accuracy, and affecting robot autonomous movement, and achieve the effect of solving low accuracy and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0027] According to an embodiment of the present application, a method for controlling a robot is provided. It should be noted that the steps shown in the flowchart of the accompanying drawings may be executed in a computer system such as a set of computer-executable instructions. A logical order is presented in the figures, but in some cases steps shown or described may be performed in an order different from this.
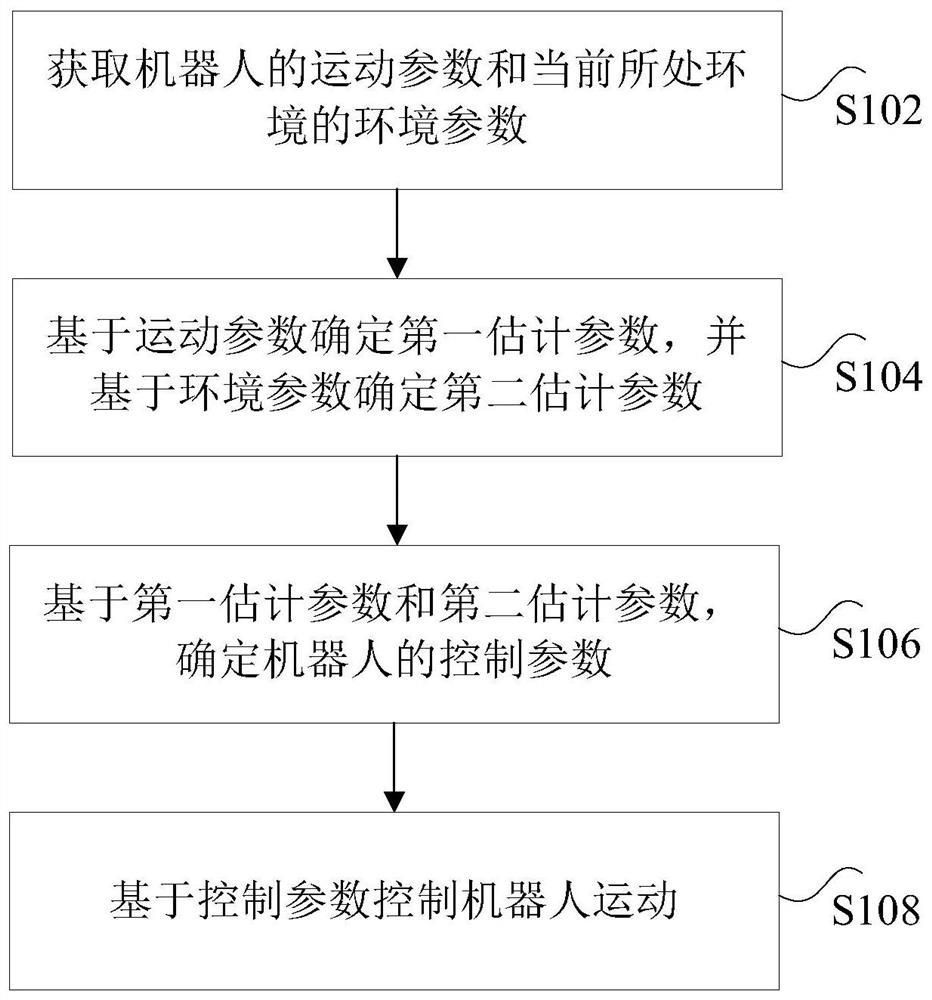
[0028] figure 1 is a flowchart of a method for controlling a robot according to an embodiment of the present application, such as figure 1 As shown, the method may include the following steps:
[0029] In step S102, the motion parameters of the robot and the environmental parameters of the current environment are obtained.
[0030] The motion parameter in the above steps may be the acceleration of the robot body or the acceleration of the robot leg, wherein the acceleration may be linear acceleration and angular acceleration. The motion parameters can be measu...
Embodiment 2
[0123] According to an embodiment of the present invention, there is also provided a control device for a robot, which can execute the control method of the robot in the above-mentioned embodiment.
[0124] Figure 4 is a schematic diagram of a control device of a robot according to an embodiment of the present invention, such as Figure 4 As shown, the device includes:
[0125] The first obtaining module 42 obtains the motion parameters of the robot and the environmental parameters of the current environment;
[0126] The first determination module 44 determines the first estimated parameter based on the motion parameter, and determines the second estimated parameter based on the environmental parameter;
[0127] The second determination module 46 determines the control parameters of the robot based on the first estimated parameter and the second estimated parameter;
[0128] The control module 48 controls the motion of the robot based on the control parameters.
[0129] ...
Embodiment 3
[0136] Embodiments of the present application also provide a computer storage medium, where the computer storage medium can store multiple instructions, and the instructions are suitable for being loaded and executed by a processor as described above Figure 1-Figure 4 The method steps of the illustrated embodiment, the specific execution process can refer to Figure 1-Figure 4 The specific description of the illustrated embodiment will not be repeated here.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More